Nagu nägime, võivad võnkuvad süsteemid olla väga erinevad. Ometigi saab neid sarnaste joonte põhjal grupeerida ning ühise lihtsustatud mudeli alla viia. Võnkuva süsteemi füüsikalist mudelit nimetatakse pendliks. Kõige sagedamini kasutatavateks mudeliteks on matemaatiline pendel, vedrupendel ja füüsikaline pendel. Kõiki pendleid iseloomustab isokroonsus ehk võime võnkeamplituudi muutumisel võnkeperioodi säilitada. See võimaldab pendleid kasutada kellade käigu regulaatorina.
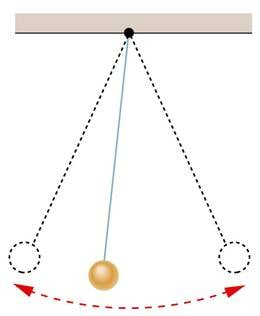
Matemaatiliseks pendliks nimetatakse venimatu kaalutu niidi otsa riputatud punktmassi. Tasakaalust väljaviimisel liigub niidi otsa riputatud keha mööda ringjoone kaart, mille kõverusraadius on võrdne niidi pikkusega.
Matemaatilise pendli sarnaselt võngub mis tahes raske ese, mis on riputatud sellega võrreldes palju kergema ja pikema niidi või nööri otsa. Matemaatilise pendli võnkumist põhjustab raskusjõud koos niidis tekkiva tõmbejõuga. Väikese võnkeamplituudi korral sõltub periood ainult pendli pikkusest l ning vaba langemise kiirendusest g:
Matemaatilise pendli abil on lihtne määrata vaba langemise kiirendust. Asjaolu, et selline pendel säilitab oma võnketasandi, kasutas prantsuse füüsik Jean Foucault 1848. aastal maakera pöörlemise tõestuseks.
Vedrupendliks nimetatakse absoluutselt elastse vedru otsa riputatud punktmassi. Võnkumist põhjustab siin elastsusjõu ja raskusjõu resultant.
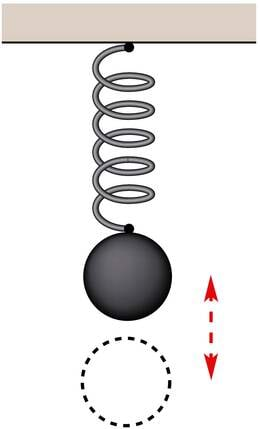
Vedrupendli võnkeperiood on määratud vedru jäikuse k ning keha massiga m:
Füüsikaliseks pendliks nimetatakse suvalise kujuga jäika keha, mis saab rippudes võnkuda liikumatu punkti ümber. Füüsikaliseks pendliks võib olla näiteks kiikuv pilt seinal või naela otsa riputatud mutrivõti. Füüsikalise pendli võnkeperiood sõltub keha kujust, massist, kinnituskoha ning raskuskeskme vahekaugusest ja vaba langemise kiirendusest.
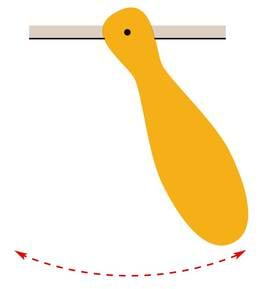
Kuna keha kuju ja riputuspunkt võivad olla väga erinevad, pole siinkohal võimalik anda füüsikalise pendli võnkeperioodi üldist valemit. Näiteks ühest otsast üles riputatud ühtlase varda võnkeperiood sõltub varda pikkusest l järgmiselt:
Uurima süsteeme, milles saavad toimuda elektrivälja ja magnetvälja energia perioodilised vastastikused muundumised. Selliseid süsteeme nimetatakse võnkeringideks.
Võnkering sisaldab alati induktiivpooli ja kondensaatorit nii nagu vedrupendel koosneb alati mingist olulise massiga kehast (koormisest) ja elastsest vedrust, mille otsa see keha on kinnitatud. Võnkeringi talitlust ongi kõige lihtsam mõista vedrupendliga võrdlemise teel.
Võnkumise tekitamiseks tuleb vedrupendel kõigepealt tasakaaluasendist välja viia. Seda võib teha vedru täiendava väljavenitamisega (J. 2.38, J. 2.39, a). Deformeeritud vedru omandab potentsiaalse energia Ep = kx2/2. Selle määravad vedru jäikustegur k ja vedru pikkuse muut Dl, mida sageli nimetatakse ka vedru deformatsiooniks x. Pendli lahtilaskmisel paneb vedru elastsusjõud koormise kiirenevalt liikuma oma tasakaaluasendi poole. Tasakaaluasendi läbimise hetkel saab vedru deformatsioon nulliks (J. 2.39, b), seevastu koormise kiirus v on parajasti maksimaalne. Potentsiaalne energia on läinud üle koormise liikumise kineetiliseks energiaks Ek = mv2/2, kus m on koormise mass ja v – selle kiirus.
Inertsi tõttu koormis ei peatu tasakaaluasendis ja vedru surutakse jälle kokku. Koormise kiirus hakkab nüüd vähenema, sest vedru elastsusjõud takistab kokkusurumist ja pidurdab koormise liikumist. Lõpuks peatub koormis asendis, mille korral tema kineetiline energia on täielikult muundunud vedru deformatsiooni potentsiaalseks energiaks (joon. 2.39, c). Kokkusurutud vedru hakkab nüüd elastsusjõu toimel taas pikenema ning koormis liigub kasvava kiirusega eelnevale vastupidises suunas (alla).
Tasakaaluasendis on kiirus jällegi maksimaalne ja pendli energia puhtalt kineetiline (joon. 2.39, d). Pärast tasakaaluasendi läbimist hakkab kiirus uuesti vähenema ning vedru venib välja. Koormise peatumisel on pendli algasend taastunud (J. 2.39, e) ja kogu protsess võib korduda.
Ülalkirjeldatule analoogilise elektromagnetvõnkumise tekitamiseks tuleb võnkering tasakaalust välja viia. Seda võib teha näiteks kondensaatori laadimisel mingi alalisvooluallika abil (J. 2.40). Laetud kondensaator omandab potentsiaalse energia, mille määravad kondensaatori mahtuvus C ja tema pinge U. Oma sügavamalt olemuselt on tegemist plaatide vahele koondunud elektrivälja energiaga Ee = CU2/2.
Lahutamisel vooluallikast ja ühendamisel pooliga hakkab kondensaator läbi pooli tühjenema. Lenzi reegli kohaselt toimib poolis tekkiv endainduktsiooni EMJ kondensaatori pingele vastupidises suunas ja piirab voolu kasvu. Alles siis, kui pinge kondensaatoril on saanud nulliks, saavutab voolutugevus oma maksimaalse väärtuse (J. 2.39, b). Kondensaatori elektrivälja energia on muundunud pooli magnetvälja energiaks Em = LI2/2, mis on vaadeldav laengukandjate liikumise kineetilise energiana.
Laengukandjad jätkavad induktiivsuse (inertsi) olemasolu tõttu liikumist. Voolu kasv asendub küll kahanemisega, sest esialgsele vastupidiselt laaduv kondensaator pidurdab laengukandjate liikumist. Alles siis, kui vool peatub, on kondensaator omandanud absoluutväärtuselt suurima, kuid esialgsele vastupidise märgiga laengu ja pinge (joon. 2.39, e). Pooli magnetvälja energia on muundunud kondensaatori elektrivälja energiaks. Kondensaatori pinge paneb nüüd laengukandjad liikuma esialgsele vastupidises suunas (päripäeva), kuid pooli induktiivsus pidurdab jällegi voolu kasvu. Vool poolis omandab suurima väärtuse alles siis, kui kondensaator on täielikult tühjenenud ja tema elektrivälja energia on pooli magnetväljale üle läinud (joon. 2.39, d). Päripäeva kulgevas voolus liigub positiivne laeng uuesti kondensaatori ülemisele plaadile. Laaduv kondensaator aga pidurdab voolu. Kui vool peatub, on taastunud võnkeringi algolek (joon. 2.39, e). Nüüd võib kogu võnkeprotsess korduda.
Vedrupendli ja võnkeringi sarnasuse põhjal võib oletada, et elektromagnetvõnkumiste periood sõltub võnkeringi pooli induktiivsusest L ning kondensaatori mahtuvusest C viisil, mis meenutab Mehaanika kursuses käsitletud vedrupendli võnkeperioodi valemit
 (2.22)
(2.22)
Massi m elektromagnetiliseks analoogiks on induktiivsus L. Vedru jäikusteguri k analoogiks pole aga mitte mahtuvus C vaid selle pöördväärtus. Vedrupendli koormise kiirust muudab vedru elastsusjõud. Voolutugevust võnkeringis muudab kondensaatori pinge, mis on seega elastsusjõu elektromagnetiliseks analoogiks. Elastsusjõud – k x on võrdeline vedru jäikusteguriga, kondensaatori pinge on aga mahtuvuse definitsiooni (valem 2.14) kohaselt mahtuvusega pöördvõrdeline (U = Q/C). Asendades valemis 2.22 koormise massi m induktiivsusega L ning jäikusteguri k mahtuvuse pöördväärtusega (1/C), saamegi elektromagnetvõnkumiste perioodi avaldise
 (2.23)
(2.23)
mida nimetatakse Thomsoni valemiks inglise füüsiku William Thomsoni ehk lord Kelvini (1824-1907) järgi.
Reaalse võnkeringi juhtmetel ja poolil on olemas takistus, mistõttu mingi osa võnkumise energiast eraldub igal võnkel soojusena. Selle tulemusena võnkumine sumbub. Sumbumise vältimiseks tuleb võnkeringile pidevalt energiat juurde anda.

Energia lisandumist võib aga juhtida ka võnkering ise. Võnkumist mille korral võnkuv süsteem täiendab ise välisest allikast oma energiavarusid, nimetatakse isevõnkumiseks. Elektromagnetilise isevõnkumisega on tegemist elektrongeneraatoris.
Elektrongeneraator on seade mis tekitab sumbumatuid elektromagnetvõnkumisi kasutades selleks kas alalisvooluallikast või mingi teise sagedusega vahelduvvooluallikast saadavat energiat. Elektrongeneraator sisaldab enamasti võnkeringi mille omavõnkesagedus määrab tekitatava võnkumise sageduse. Lisaenergia andmiseks võnkeringile kasutatakse positiivset tagasisidet. Võnkering ise avab ventiili, läbi mille ta vooluallikalt energiat juurde saab (J. 2.41).
See toimub hetkel, mil välise allika poolt tekitatav vool on võnkeringis endas kulgeva vooluga samasuunaline ja tugevdab võnkumist.
Juhul kui võnkeringis rakendub perioodiliselt muutuv väline pinge, on tegemist sundvõnkumisega. See toimub välispinge sagedusel. Sundvõnkumise amplituud sõltub välise pinge sagedusest. Kui sagedus saab võrdseks võnkeringi omavõnkesagedusega, tekib resonants. See on nähtus mille korral võnkumise amplituud (pinge või voolutugevus) kasvab järsult (J. 2.42). Väline pinge toimib omavõnkumisega samas taktis (lükkab laengukandjaid suunas, milles nad juba niigi liiguvad).
Resonants elektromagnetvõnkumistel leiab laialdast kasutamist mingi kindla sagedusega võnkumise väljavalimiseks paljude hulgast. Seda tuleb teha näiteks raadio häälestamisel mingi saatejaama sagedusele.
Raadio häälestamisel muudetakse antenni (p. 2.8.1) ahelas paikneva võnkeringi kondensaatori mahtuvust ja seega ka võnkeringi omavõnkesagedust. Nii tekitatakse resonants vajaliku saatejaama sagedusel. Tulemuseks on just selle jaama poolt lähetatavate võnkumiste võimendamine raadiovastuvõtjas.
Näide 2.5.
Raadio häälestusvõnkeringi pooli induktiivsus on 0,l μH. Milline peab olema võnkeringi kondensaatori mahtuvus, selleks et võtta vastu sagedusel 100 MHz edastatavaid saateid?
Antud:
f = 100 MHz = 108 Hz
L = 0,1 μH = 10-7 H 

_______________
C = ?
Vastus: Võnkeringi kondensaatori mahtuvus peab olema 25,3 pF.