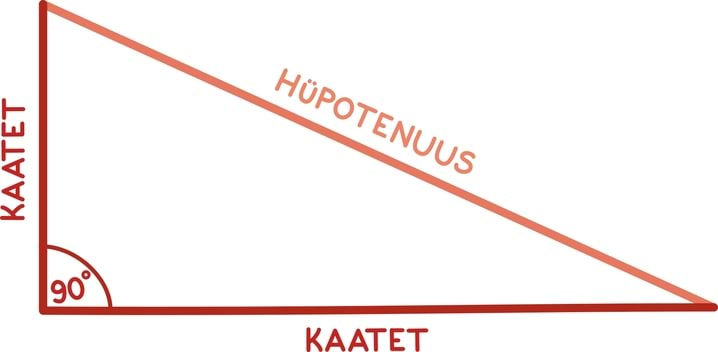
Tuletame meelde, et täisnurkseks kolmnurgaks nimetatakse kolmnurka, mille üks nurk on 90 kraadi. Täisnurkse kolmnurga külgedel on erilised nimetused: 90-kraadilise nurga lähiskülgi nimetatakse kaatetiteks ning vastaskülge hüpotenuusiks.
Nagu mainisime on „sama kujuga” kolmnurkades võrdsed kõik nurgad ning ka üksteisele vastavate nurkade lähiskülgede suhted.
Kui teame lisaks, et kolmnurk on täisnurkne, siis piisab kõikide nurkade määramiseks veel ainult ühe nurga teadmisest – on ju sel juhul üks nurk 90 kraadi, teist nurka teame ja kolmanda nurga võime välja arvutada, kuna kõige kolme nurga summa on 180 kraadi.
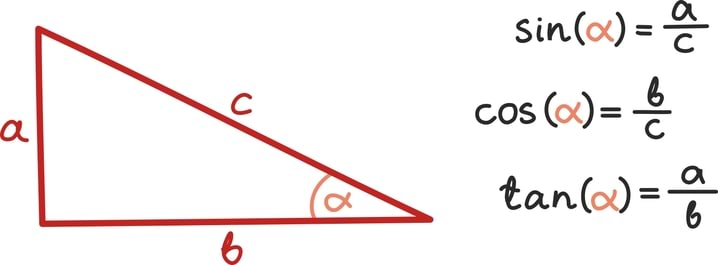
Ehk teisisõnu, kui meile on antud üks kindel teravnurk (miks just teravnurk?), mille tähistame kokkuleppeliselt kreeka tähestiku esimese tähega α, siis teame, millise kujuga on meie kolmnurk ning saame kindlaks määrata ka külgedevahelised suhted:
- nurga α vastaskaateti pikkus jagatud hüpotenuusi pikkusega
- nurga α lähiskaateti pikkus jagatud hüpotenuusi pikkusega
- nurga α vastaskaateti pikkus jagatud lähiskaateti pikkusega
Kõik kolm suhet annavad vastuseks ühe arvu. Kuna need arvud sõltuvad üheselt ainult valitud nurgast α, on tegemist funktsioonidega [lk 64] nurgaväärtusest.
Näiteks kui α = 45º, siis on ka teine teravnurk 45º ning seega kolmnurk võrdhaarne. Kaatetitevaheline suhe on seega täpselt 1.
Leitud funktsioonid on käibel nii tihedasti, et neile on mõistlik anda lühemad nimetused:
- vastaskaateti ja hüpotenuusi suhet kutsutakse siinuseks nurgast α,
- lähiskaateti ja hüpotenuusi suhet kutsutakse koosinuseks nurgast α,
- vastaskaateti ja lähiskaateti suhet nimetatakse tangensiks nurgast α.
Neid kolme funktsiooni kokku kutsutakse trigonomeetrilisteks funktsioonideks ning otse definitsioonist võib märgata seost nende vahel: tangens on võrdne siinuse ja koosinuse jagatisega.
Nende vanamoodsate nimetuste jaoks on matemaatiliselt kasutusel veel järgnevad lühendid:
Eelneva tulemuse, kus 45-kraadise nurga puhul on kaatetitevaheline suhe täpselt 1, saaksime nüüd kirja panna järgnevalt:
Olgugi et nende funktsioonide väärtused ise on leitud külgedevaheliste suhete kaudu ühes nurga poolt kindlaks määratud täisnurkses kolmnurgas, siis ei pea funktsiooni ennast sugugi rakendama ainult täisnurkse kolmnurga nurkadele. Trigonomeetrilisi funktsioone võib vabalt rakendada ka nurgaväärtustele, mis pärinevad viisnurgast, lihtsalt kahe haara vahelt või mujaltki.
Tõsi küll, praegu nõuame endiselt, et kasutatav nurgaväärtus oleks teravnurkne ehk väiksem kui 90 kraadi, sest oskame ainult sel juhul külgedevahelisi suhteid leida ja seega trigonomeetrilisi funktsioone defineerida. Kohe vabaneme aga sellestki ettekirjutusest, alustades üsna loomulikust küsimusest.
Kuidas trigonomeetrilised funktsioonid välja näevad?
Sellele küsimusele vastamiseks peame lihtsalt joonistama kolmnurki erinevate nurga α väärtustega.
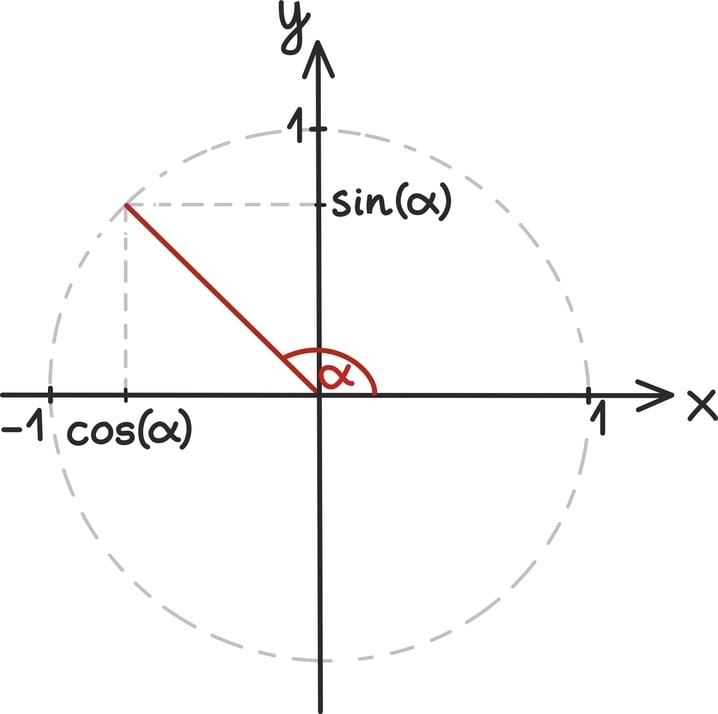
Kolmnurga suuruse võime muidugi ise valida. Kaval on valida kolmnurga suurus nii, et hüpotenuusi pikkuseks on üks. Sel juhul on nurga siinus võrdne täpselt vastaskaateti pikkusega ning nurga koosinus võrdne lähiskaateti pikkusega.
Seame nüüd ühe kolmnurga tipu koordinaatteljestiku nullpunkti ning joonistame sinna hüpotenuusi pikkusega üks. Kaatetiteks jäävad hüpotenuusi otsast x-teljele viiv lõik ja ka lõik, mis sealt tagasi nullpunkti jõuab.
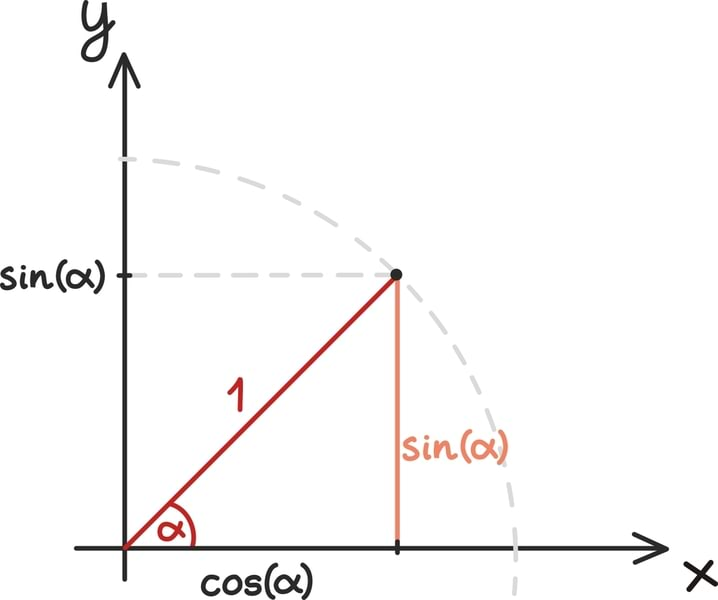
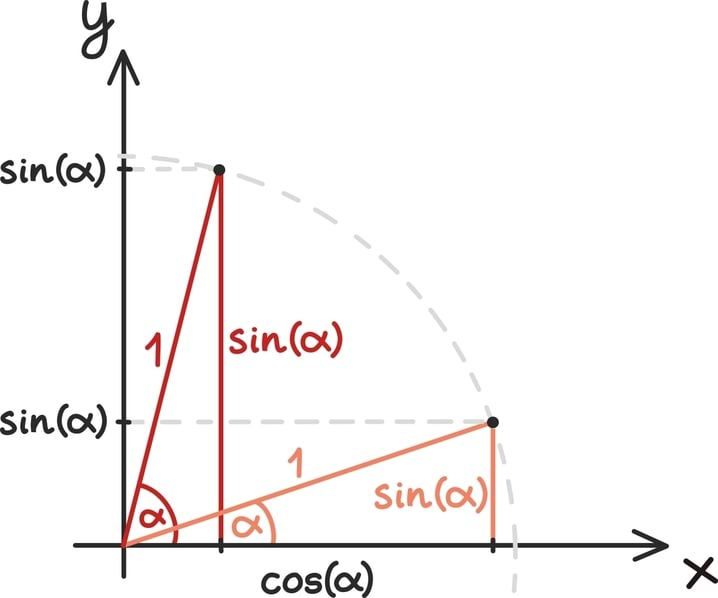
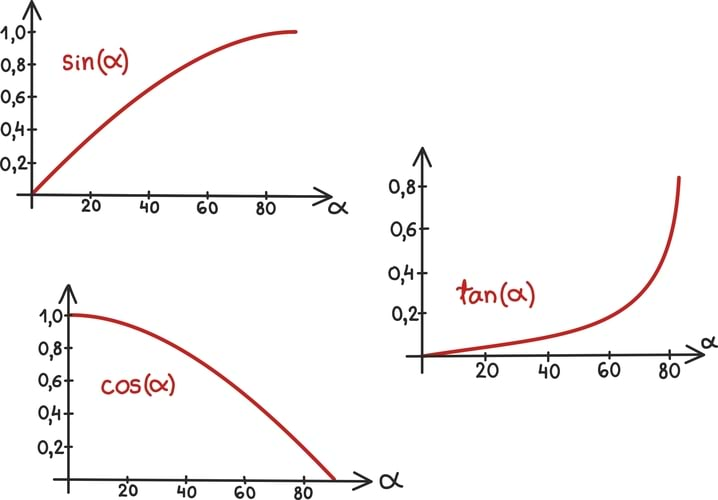
Nüüd, siinus mingist nurgast on vastaskaateti ja hüpotenuusi pikkuste suhe. Kuna hüpotenuus on üks, siis siinus ongi siin võrdne vastaskaateti pikkusega. Joonisel on näha, kuidas siinuse väärtus kasvab koos nurga väärtusega.
Vastaskaateti pikkuse annab aga täpselt haara ja ringjoone lõikepunkti y-koordinaat. Koosinuse annab samas raamistikus selle lõikepunkti x-koordinaat ning tangensi y- ja x-koordinaadi suhe. Seda viimast võime tõlgendada veel lihtsamaltki: tangens näitab haara poolt määratud sirge tõusu. Kui jagame y-koordinaadi x-koordinaadiga, siis saame teada, kui palju haara määratud sirge iga ühiku kohta tõuseb.
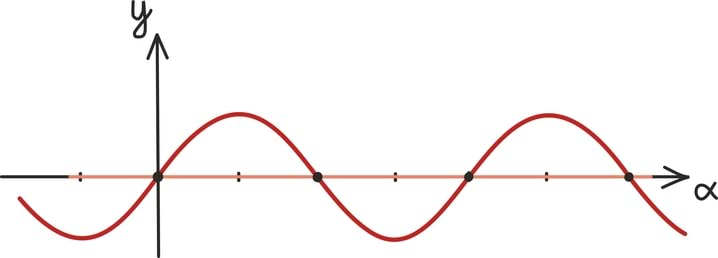
Edasi on lihtne panna arvuti, mõni sõber või sõbranna siinuse, koosinuse ja tangensi graafikuid joonistama:
Märkame aga, et meie nüüdses konstruktsioonis ei ole küll midagi teravnurkade jaoks spetsiifilist. Leidsime nurga siinuse, koosinuse ja tangensi lihtsalt kui nurgahaara ja ühikringjoone lõikepunkti koordinaadid. See nurga haar võib ju aga x-teljega jätta ükskõik millise nurga, mitte ainult teravnurga. Nii saamegi defineerida trigonomeetrilised funktsioonid suvalise nurgaväärtuse, näiteks 2013 kraadi jaoks.
Trigonomeetrilised funktsioonid näevad oma täies pikkuses välja järgmised:
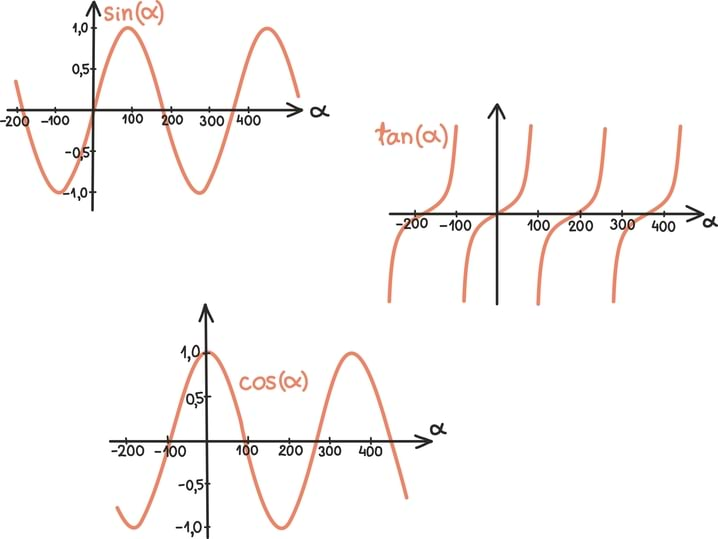
Esiteks võib märgata, et trigonomeetrilised funktsioonid on ilusasti perioodilised ehk teisisõnu nende kuju on mööda x-telge edasi liikudes korduv. See tuleneb muidugi otseselt definitsioonist – nurgad, mis erinevad täispöörde võrra, paiknevad ju x-telje suhtes täpselt ühte moodi ning seega annavad ka täpselt sama siinuse, koosinuse, tangensi. Trigonomeetrilistest funktsioonidest ja perioodilisusest räägime aga pikemalt juba teises alapeatükis [lk 230].
Teise asjana ehmatab muidugi ära tangensi katkevus iga poolringi ehk iga 180 kraadi järel. Seejuures esimene katkemine on juba 90 kraadi juures. Selles ei ole siiski midagi ehmatavat – see juhtub ju lihtsalt sellepärast, et neis kohtades on koosinus võrdne nulliga ning kuna nulliga jagada ei saa, ei saa ka tangensile väärtust leida.
Sellest murest võib mõelda ka sirge tõusu raames: sirgele, mis on vertikaalne ehk y-teljega paralleelne, ei oskagi ju tõusu vastavusse seada. Tõuseb ta lõpmatult kiiresti ülespoole või allapoole?
Trigonomeetriliste funktsioonide pöördfunktsioonid
Mitmel pool õpikus tulevad esile pöördfunktsioonid. Lühidalt rääkisime neist juba funktsioonide peatükis [lk 68], kus täheldasime, et pöördfunktsioonid rahuldavad järgmist seost:
Teisisõnu, ühe funktsiooni pöördfunktsioon nullistab täpselt tema efekti ning annab tagasi algse väärtuse.
Näiteks võiks öelda, et kolme liitmise pöördfunktsioon on kolme lahutamine. Hiljem näeme, et eksponentsiaalfunktsiooni pöördfunktsioon on logaritmfunktsioon [lk 290], ning et tuletis ja integraalgi on teineteise pöördoperatsioonid [lk 352].
Trigonomeetria kontekstis mõtleme pöördfunktsiooni all üsna lihtsat küsimust: kui enne leidsime nurga abil tema siinuse või koosinuse või tangensi, siis nüüd tahaksime ette antud väärtuse abil leida, mis nurga siinus, koosinus või tangens ta parasjagu on.
Graafiliselt tähendab see järgmist: joonistame oma trigonomeetrilise funktsiooni graafiku, valime mingi väärtuse c ning siis küsime, kus kohas funktsiooni graafik lõikab sirget y = c .
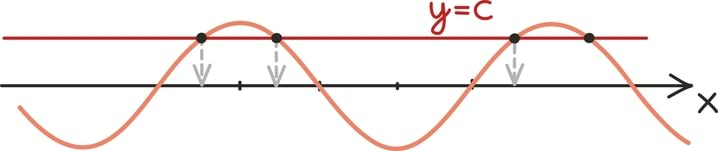
Näiteks kui teaksime, et siinus annab väärtuseks nulli, läheksime tema graafiku juurde ja vaataksime, kus ta lõikab x-telge. Vastuseks saaksime, et nurk võiks olla 0 kraadi või 180 kraadi või mõni teine 180 kraadi kordne.
Arkussiinus ja arkuskoosinus
Nagu graafikult näeme, siis siinus- ning koosinusfunktsiooni jaoks neid lõikepunkte alati ei leidugi. Nimelt kui |c| > 1, on sirge y = c funktsiooni graafikust täienisti ülal- või allpool. Kõikidel teistel juhtudel on aga lõikepunkte lõpmatult palju.
See tähendab, et pöördfunktsiooni defineerimisel peame olema üsna ettevaatlikud. Esiteks saame pöördfunktsioonile väärtuse anda ainult vahemikus [–1; 1], mis siis on tema nii-öelda määramispiirkonnaks. Teiseks tuletame meelde, et funktsioon saab võtta täpselt ühe väärtuse – seega peame iga sirge jaoks kuidagi välja valima just ühe lõikepunkti.
Üks võimalus selle tegemiseks on lihtsalt nõuda, et vastus oleks mingis kindlas vahemikus – jooniselt näeme, et siinusfunktsioon võtab kõik oma võimalikud väärtused vahemikus [–90º; 90º] ning koosinusfunktsioon näiteks vahemikus [0; 180º]. Nendes piirkondades on funktsioonid üksühesed [lk 68] ning võime kohe defineerida ka pöördfunktsioonid.

Nii ongi enamasti defineeritud arkussiinus, mida tähistatakse tihti arcsin(x), kui funktsioon, mis on siinuse pöördfunktsioon vahemikus [–90º; 90º] ehk siis rahuldab selles vahemikus seost arcsin(sin(x)) = x.
Sarnaselt on siis defineeritud ka arkuskoosinus ehk arccos(x), ainult vahemikuna on kasutuses [0; 180º].
Olenevalt eesmärgist võib mõnikord kasutada muidugi ka mõnda muud vahemikku. Veelgi enam, vahepeal tahaksime kõiki vastuseid korraga esitada. Siis kirjutame umbes nii:
Sel juhul ei ole meil küll rangelt enam funktsioon, vaid loetleme lihtsalt kõik sirge y = 0 ning siinusfunktsiooni lõikepunktid ja neid on palju!
Arkustangens
Tangensiga on selles suhtes lihtsam lugu, et ta võib võtta kõiki reaalarvulisi väärtusi. Seega on tangensi pöördfunktsiooni ehk arkustangensi määramispiirkonnaks kogu reaaltelg.
Probleem, et tangensfunktsioon on mitmes kohas sama väärtusega, muidugi säilib. Seega tuleb ka arkustangensi kui funktsiooni määramiseks välja valida üks kindel piirkond. Mõistlik valik on näiteks (–90º; 90º), aga sobiks ka mõni teine.
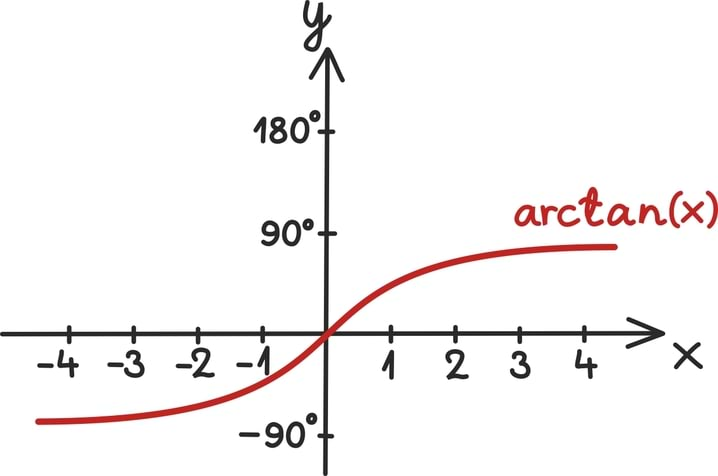
Arkustangensit tähistatakse arctan(x).
Tähistustest
Nobeli auhinna võitjale füüsik Richard Feynmanile ei meeldinud trigonomeetriliste funktsioonide tähistused sugugi. Talle tundus, et sin tähendab kolme arvu s, i ja n kokkukorrutamist. Veel vähem meeldis talle siinuse pöördfunktsioon, mida mõnel pool mujal tähistatakse kui sin–1(α). Õigusega tekitas see segadust, sest seda võiks tõlgendada kui
mida sellega enamasti silmas ei peeta. Igal juhul kasutas ta kooliajal siinuse ja siinuse pöördfunktsiooni järgmisi tähistusi:

Üsna varsti märkas ta siiski, et selliseid tähistusi kasutades ei saanud keegi teine tema mõtetest ja selgitustest suurt midagi aru. Seega soovitame siiski jääda tähiste sin ja arcsin juurde.
Miks just täisnurksed kolmnurgad?*
Natuke järele mõeldes võib kummitama jääma üks küsimus. Miks me seome nurki ja külgedevahelisi suhteid ikkagi just kolmnurkade kaudu ning miks just täisnurksete kolmnurkade kaudu? Kas see on lihtsalt ajalooline relikt või võib sellele ka selgitust leida?
Esimese vastusena võiks kohe öelda, et kolmnurkadest ei saa üle ega ümber. Niipea kui meil on defineeritud kaks lõigupikkust ja nendevaheline nurk, ongi meil juba kolm punkti – nurgatipp ja lõikude teised otspunktid – ja seega ka kolmnurk. Lisaks võib ju iga teise hulknurga alati kolmnurkadeks jagada.
Eelkõige on aga põhjus järgmine: kolmnurgad on ainsad hulknurgad, kus
- küljepikkuste vahelised suhted määravad üheselt ära kõik nurgad
- ning ka vastupidi, teades kõiki kolmnurga nurkasid, on määratud kõik külgedevahelised seosed.
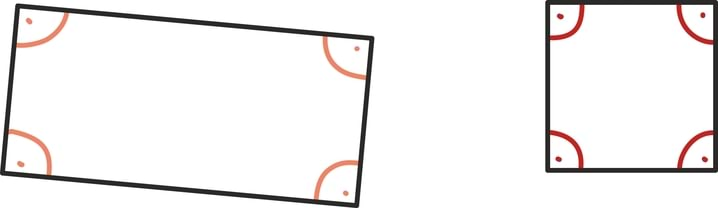
Kumbki neist seostest näiteks nelinurkade puhul enam ei kehti. Nimelt kui nelinurga neli külge on võrdsed, võivad nurgad olla endiselt erinevad: meil võib olla nii kena ruut või ka üsna lapergune romb.
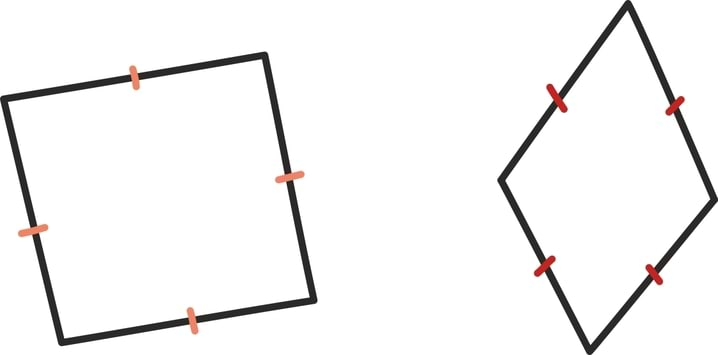
Teistpidi, teadmine, et kõik neli nurka on täisnurgad, ütleb meile vaid, et tegemist on ristkülikuga, ning muidugi leidub väga erineva külgede suhtega ristkülikuid.
Aga isegi kui lepime, et just kolmnurgad on mõeldud nurkade ja külgedevaheliste suhete sidumiseks, siis miks on kasutusel just täisnurksed kolmnurgad?
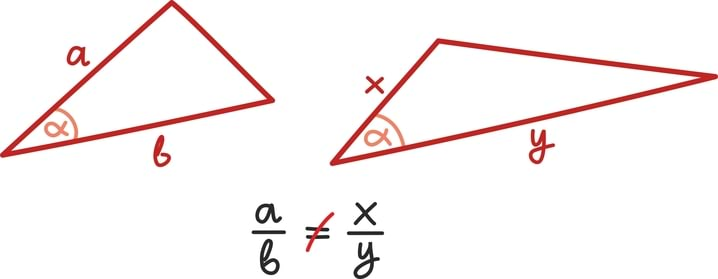
Nagu mainisime, on kolmnurga „kuju” määramiseks vaja teada vähemalt kahte nurka. Ainult ühest nurgast lähiskülgede suhte määramiseks ei piisa, sest sama nurga lähiskülgede suhe võib olla väga erinev:
Kuna teame, et iga kahe nurga teadmisest piisab kolmnurga „kuju” määramiseks, on kaval nipp üks nurk alatiseks fikseerida. Nagu eespool ka nägime, on sel juhul kolmnurga „kuju” leidmiseks vaja veel teada ainult ühte nurka ning on täiesti mõistlik rääkida selle nurga lähiskülgede vahelisest suhtest.
Fikseeritava nurga suuruse võiksime muidugi vabalt valida. Siiski, kõige paremini käsitletava, loomulikuma ja ilusama teooria saame kasutades täisnurkseid kolmnurki – ehk siis fikseerime ühe nurga täisnurgaks.
Põhjuseid selle valiku eelistamiseks on mitmeid, mõned üksikud neist on näiteks järgnevad.
- Nurk 90º on kõige sõmmeetrilisem valik – ta on täpselt poolel teel 0 kraadist 180 kraadini.
- Nagu nägime,võime sel juhul trigonomeetrilisi funktsioone defineerida lihtsalt ühikringjoone x- ning y-koordinaatide abil.
- Skalaarkorrutisel on tänu sellele valikule ilus valem vektorite pikkuste ja nendevahelise nurga koosinuse abil [lk 144].
- Iga muu kolmnurga saame jagada täisnurkseteks kolmurkadesks ja seeläbi leida ka nurkade ja külgede vahelisi seoseid – ühte neist nimetatakse siinusteoreemiks.