Inimeste rajatud ehitised peavad olema püsivad hoolimata neile mõjuvatest jõududest. Maja peab olema stabiilne hoolimata mõjuvast raskusjõust ja tuule survest, sild peab püsima hoolimata seda allapoole tõmbavast raskusjõust ja autode poolt põhjustatud korduvatest tõugetest.
Füüsika üheks huviobjektiks on asjaolud, mis lubavad objektil olla stabiilne hoolimata temale mõjuvatest jõududest. Selles peatükis uurime me stabiilsuse kahte põhilist aspekti: jäigale kehale mõjuvate jõudude ja jõumomentide tasakaalu ning mittejäikade kehade elastsust – omadust, mis määrab, kuidas sellised objektid deformeeruvad. Vastavad füüsikalised arvutused, kui nad on läbi viidud korrektselt, on andnud materjali loendamatutele artiklitele füüsika- ja tehnikaajakirjades, kui aga ebakorrektselt, siis – loendamatutele artiklitele ajalehtedes ja kohtuasjadele.
Mõelgem järgmistele objektidele: (1) laual lebav raamat, (2) hokilitter, mis libiseb konstantse kiirusega hõõrdevabal pinnal, (3) laeventilaatori pöörlevad labad ja (4) konstantse kiirusega sirgjooneliselt liikuva jalgratta ratas. Kõigi nende nelja korral kehtib:
- Massikeskme liikumishulk on konstantne.
- Pöörlemishulk massikeskme või suvalise teise punkti suhtes on konstantne.
Me ütleme, et sellised objektid on tasakaalus. Tasakaalu kaks tingimust on seega
Selles peatükis tegeleme situatsioonidega, kus need konstandid valemites 12-1 on nullid, s.t me tegeleme suuresti objektidega, mis ei liigu – ei kulgevalt ega pöörlevalt – taustsüsteemis, milles me neid vaatleme. Sellised objektid on staatilises tasakaalus. Neljast eelpoolmainitud objektist on vaid üks – laual lebav raamat – staatilises tasakaalus.
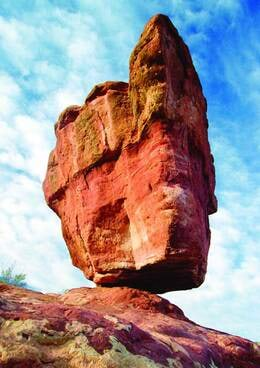
Balansseeriv kaljurahn joonisel 12-1 on teine näide objektist, mis on staatilises tasakaalus – vähemalt praegu. Ta jagab seda olekut loendamatute teiste paigalseisvate objektidega nagu näiteks katedraalid, majad, kartoteegikapid ja takorestoranid Mehhikos.
Meenutame nüüd punktis 8-6 sisse toodud mõisteid. Kui keha, mis on mingi jõu poolt tasakaaluolekust välja viidud, naaseb pärast jõu mõju lõppemist endisesse staatilise tasakaalu olekusse, siis räägime me püsivast (stabiilsest) staatilisest tasakaalust. Selle näiteks on ümmargune kuulike poolkerakujulise anuma põhjas. Kui aga väike jõud võib keha nihutada ja lõpetada tasakaaluoleku, siis on keha ebapüsivas (ebastabiilses ehk labiilses) tasakaalus.
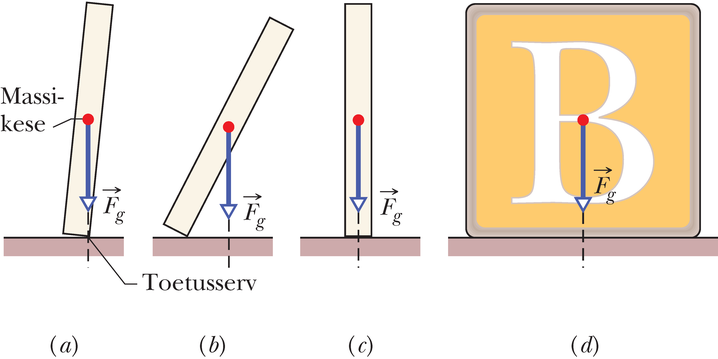
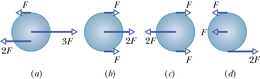
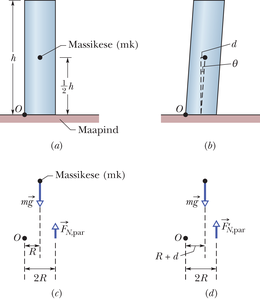
Näiteks oletame, et oleme tasakaalustanud doominokivi nii, et tema massikese asub toetusserva läbival vertikaalil, nagu joonisel 12-2a. Raskusjõu poolt tekitatud jõumoment toetusserva suhtes on null, kuna jõu mõjumissiht läbib seda serva. Seetõttu on kivi tasakaalus. Muidugi, ka juhuslikust häiritusest põhjustatud nõrk jõud rikub selle tasakaalu. Sellisel juhul jõu mõjumissiht nihkub ühele poole toestusserva, nagu joonisel 12-2b, ja jõu tekitatud jõumoment kallutab kivi veelgi. Seetõttu on doominokivi joonisel 12-2a ebastabiilses tasakaalus.
Doominokivi joonisel 12-2c ei ole aga samavõrd ebastabiilne. Selle kivi ümberlükkamiseks peab väline jõud esmalt nihutama ta olekusse joonisel 12-2a, kus massikese asub vertikaalil toetusserva kohal, ja sellest pisut kaugemalegi. Nõrk jõud ei kukuta seda doomonokivi, küll aga tugev sõrmenips kivi pihta. (Kui me moodustame rivi sellistest püstasendis doominokividest, võib nips esimese pihta põhjustada terve rivi ümberkukkumise.)
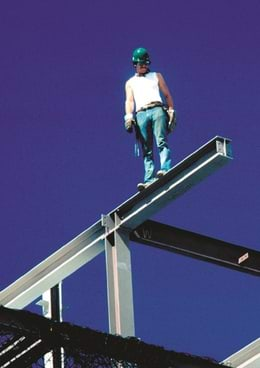
Laste kuubikujuline mänguklots joonisel 12-2d on veelgi stabiilsem, kuna tema massikeset tuleb nihutada veelgi rohkem, et see liiguks üle toetusserva. Sõrmenips ei pruugi klotsi ümber lükata. (Sel põhjusel pole te ka kunagi näinud ümberkukkuvate kuubikute rivi.) Tööline joonisel 12-3 meenutab korraga nii doominokivi kui kuubikut: piki tala on ta toetuspind lai ja asend kindel, talaga risti on toetuspind väike ja asend ebastabiilne (ja töölise püsimine võib sõltuda juhuslikust tuulepuhangust).
Staatilise tasakaalu analüüs on väga oluline inseneripraktikas. Konstruktor peab leidma ja määratlema kõik välised jõud ja jõumomendid, mis võivad struktuurile mõjuda, ja kindlustama kas hea konstruktsiooni või materjalide valikuga, et struktuur jääks igal juhul stabiilseks. Selline analüüs on vajalik kindlustamaks, et sillad ei kukuks kokku liikluse ja tuule mõjul ja et lennuki maandumistelik toimiks ka järsu maandumisega kaasnevate põrutuste korral.
Keha kulgevat liikumist kirjeldab Newtoni teine seadus, mis liikumishulga kaudu on antud valemiga 9-27:
Kui keha on nihketasakaalus, s.t kui on konstantne, siis ja peab kehtima
Keha pöördliikumist kirjeldab Newtoni teine seadus pöörlemishulga kaudu väljendatuna (valem 11-29):
Kui keha on pöörlemistasakaalus, s.t kui on konstantne, siis ja peab kehtima
Seega on keha tasakaalu kaks tingimust järgmised.
- Kõikide kehale mõjuvate väliste jõudude vektorsumma peab olema null.
- Kõigi kehale mõjuvate väliste jõumomentide vektorsumma suvalise punkti suhtes peab samuti olema null.
Need nõuded kehtivad ilmselt staatilise tasakaalu korral. Samad tingimused kehtivad aga ka üldisema tasakaalu korral, kus ja on konstantsed, kuid nullist erinevad.
Võrrandid 12-3 ja 12-5 kui vektorvõrrandid on mõlemad ekvivalentsed kolme sõltumatu võrrandiga vastavate vektorite komponentide jaoks, üks iga koordinaattelje sihi kohta.
Lihtsustame käsitlust, vaadeldes ainult selliseid olukordi, kus kehale mõjuvad jõud toimivad vaid -tasandis. See tähendab, et ainsad jõumomendid, mis võivad kehale mõjuda, saavad põhjustada vaid pöördeid ümber telje, mis on paralleelne -teljega. Selle eeldusega kõrvaldame me ühe jõuvõrrandi ja kaks momentide võrrandit võrranditest 12-6, jättes järele võrrandid
Siin on summaarne jõumoment, mille välised jõud tekitavad -telje või suvalise sellega paralleelse telje suhtes.
Hokilitter, mis libiseb konstantse kiirusega üle jää, rahuldab võrrandeid 12-7, 12-8 ja 12-9 ning on seetõttu tasakaalus, kuid mitte staatilises tasakaalus. Staatilise tasakaalu jaoks peab litri impulss olema mitte ainult konstantne, vaid võrduma nulliga – litter peab jääl seisma. Seega on staatilise tasakaalu jaoks veel üks tingimus:

KONTROLLKÜSIMUS 1
Ruumilise ulatusega kehale mõjuv raskusjõud on keha üksikutele elementidele (aatomitele) mõjuvate raskusjõudude vektorsumma. Selle asemel, et vaadelda kõiki neid üksikuid elemente, võime me öelda:
Sõna „efektiivselt” tähendab siin seda, et kui mingil viisil lülitada välja keha üksikutele elementidele mõjuvad gravitatsioonijõud ja rakendada jõud raskuskeskmesse, siis kehale mõjuvad summaarne jõud ja summaarne jõumoment (suvalise punkti suhtes) ei muutu.
Oleme siiani eeldanud, et raskusjõud on rakendatud keha massikeskmele (lühendatult mk). See on samaväärne eeldusega, et keha raskuskese ühtib massikeskmega. Meenutame, et keha jaoks massiga on jõu väärtuseks , kus on kiirendus, mille see jõud põhjustaks, kui keha langeks vabalt. Järgnevalt tõestame:
Tehtud eeldus on ligilähedaselt õige igapäevaste objektide jaoks, sest muutub vaid pisut mööda Maa pinda ja kahaneb vaid veidi kõrguse kasvades. Seega oleme selliste objektide korral nagu hiir ja põder õigustatud lugema, et raskusjõud on rakendatud massikeskmesse. Tõestame nüüd selle väite.
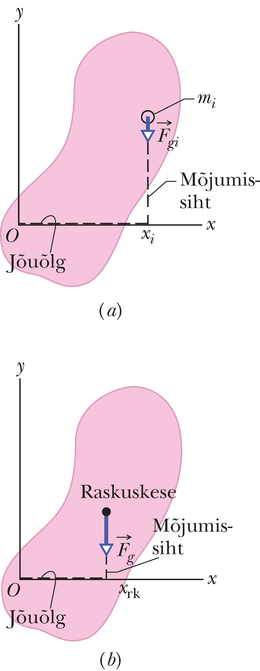
Vaatleme esmalt keha üksikuid elemente. Joonis 12-4a kujutab ulatusega keha, mille mass on , ja ühte selle elementi massiga mi. Igale sellisele elemendile mõjub raskusjõud, mille suurus on . Alaindeks juures viitab asjaolule, et on raskuskiirenduse väärtus elemendi asukohas (ja võib olla erinev teiste elementide jaoks).
Iga jõud joonisel 12-4a tekitab vastavale elemendile rakendatud jõumomendi alguspunkti suhtes, mille õlg on . Kasutades valemit 10-41 (), saame jõumomendi esitada kujul
Keha kõikidele elementidele rakendatud summaarne jõumoment on siis
Vaatleme nüüd keha tervikuna. Joonisel 12-4b on kujutatud raskusjõud , mis on rakendatud keha raskuskeskmele. See jõud tekitab kehale mõjuva momendi , mille õlg suhtes on . Kasutades uuesti valemit 10-41, võime selle jõumomendi esitada kujul
Kehale mõjuv raskusjõud on summa keha elementidele mõjuvatest raskusjõududest , seega võime valemis 12-12 kirjutada asemel , saame
Meenutame nüüd, et raskuskeskmesse rakendatud jõu moment on võrdne kõigi jõudude poolt tekitatud jõumomentide vektorsummaga. (Nii defineerisime me raskuskeskme.) Seega on valemis 12-13 võrdne väärtusega valemis 12-11. Võttes need kaks võrrandit kokku, võime kirjutada
Edasine juhtmõte: kui kiirendused kõikide elementide asukohtades on samad, võime viimasest võrrandist taandada ja saame
Keha kõikide elementide masside summa võrdub keha massiga. Seetõttu võime võrrandi 12-15 ümber kirjutada kujul
Selle võrrandi parem pool annab keha massikeskme koordinaadi (valem 9-4). Seega oleme jõudnud tulemuseni, mida tahtsimegi tõestada:
Hakkame uurima nelja staatilise tasakaaluga seotud näidisülesannet. Igas neist valime me ühest või enamast objektist koosneva süsteemi, millele rakendame tasakaaluvõrrandeid (valemeid 12-7, 12-8 ja 12-9). Tasakaaluoleku seisukohast olulised jõud on kõik -tasandis, mis tähendab, et vastavad jõumomendid on paralleelsed -teljega. Seega jõumomentide tasakaalu valemi 12-9 kasutamisel valime me telje, mille suhtes jõumomente arvutada, paralleelseks -teljega. Kuigi võrrand 12-9 kehtib telje suvalise valiku korral, on näha, et mõned valikud lihtsustavad valemi 12-9 rakendamist, lubades elimineerida ühe või kaks tundmatuid jõudusid sisaldavat liiget.
KONTROLLKÜSIMUS 2
Näidisülesanne 12-1 Arenda oma oskusi
Lahendus
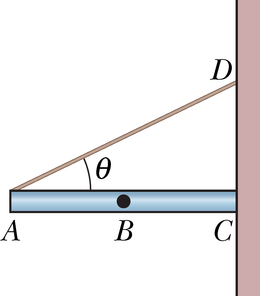
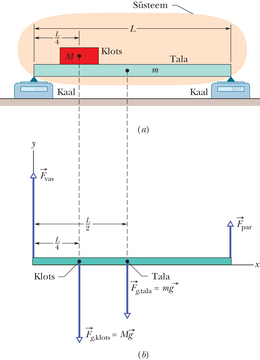
JUHTMÕTTED Esimesed sammud iga staatilise tasakaalu ülesande lahendamisel on järgmised: määratle selgelt uuritav süsteem ja siis koosta sellele mõjuvate jõudude vektordiagramm, näidates kõik süsteemile mõjuvad jõud. Valime siin süsteemiks tala ja klotsi koos vaadelduna. Süsteemile mõjuvad jõud on näidatud vektordiagrammil joonisel 12-5b. (Süsteemi valik nõuab kogemust ja sageli on häid valikuid rohkem kui üks: vt juhist 2 ülesannete lahendamise juhistes.) Kuna süsteem on staatilises tasakaalus, võime sellele rakendada jõudude tasakaalu võrrandeid (valemeid 12-7 ja 12-8) ja jõumomentide tasakaalu võrrandit (valemit 12-9).
Arvutused: Talale kaalude poolt mõjuvad normaaljõud on vasakul pool ja paremal pool . Kaalude näidud, mis meid huvitavad, on võrdsed nende jõudude suurustega. Talale mõjuv raskusjõud on rakendatud tala massikeskmesse ja selle suurus on . Klotsile mõjub samuti raskusjõud , mis on rakendatud klotsi massikeskmesse ja mille suurus on . Joonise 12-5b lihtsustamiseks on klots esitatud punktina tala piirides ja jõu vektor on joonestatud algavana sellest punktist. (Vektori nihe piki oma mõjumissihti ei muuda jõu poolt tekitatud momenti suvalise joonisega risti oleva telje suhtes.)
Jõududel puuduvad -komponendid, seega ei anna võrrand 12-7 () midagi. Võrrand 12-8 -komponendi jaoks () annab
See võrrand sisaldab kahte tundmatut jõudu ja , seega peame kasutama ka võrrandit 12-9 ehk jõumomentide tasakaalu. Me võime seda rakendada joonise 12-5 tasandiga ristuva suvalise telje suhtes. Me kasutame ka üldist reeglit jõumomentidele märkide omistamiseks: kui jõumoment sunnib algselt paigalolevat keha pöörduma ümber pöörlemistelje kellosuti suunas (päripäeva), on moment negatiivne. Kui pöörlemine oleks vastassuunaline (vastupäeva), oleks moment positiivne. Jõumomendid võime kirjutada kujul , kus õlg on jaoks, jaoks, jaoks ja jaoks.
Asendame need jõumomendid tasakaaluvõrrandisse (), saame
mis annab
Lahendades nüüd võrrandi 12-18 jaoks ja asendades sinna viimase tulemuse, saame
Paneme tähele lahendusstrateegiat: kui kirjutasime välja jõudude tasakaalu võrrandi, jäime kimpu kahe tundmatuga. Kui me oleksime kirjutanud jõumomentide tasakaalu võrrandi välja suvalise telje suhtes, oleksime jällegi olnud kimpus nende kahe tundmatuga. Kuna aga valisime telje, mis läbib ühe tundmatu jõu, antud juhul , rakenduspunkti, siis me hätta ei jäänud. Meie valik kõrvaldas täpselt selle jõu momentide võrrandist, võimaldamaks leida teise tundmatu jõu, suurust. Siis pöördusime tagasi jõudude tasakaalu võrrandi juurde, et leida veel määramata tundmatu jõu suurus.
Näidisülesanne 12-2
Lahendus
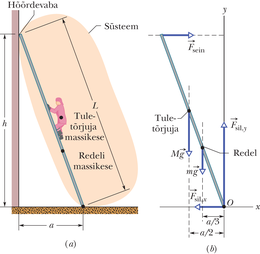
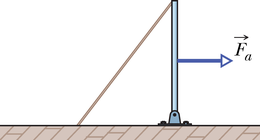
JUHTMÕTTED Valime oma vaadeldavaks süsteemiks tuletõrjuja koos redeliga ja joonistame sellele mõjuvate jõudude vektordiagrammi (joonis 12-6b). Kuna süsteem on staatilises tasakaalus, siis on rakendatavad tasakaaluvõrrandid (valemid 12-7 kuni 12-9).
Arvutused: Joonisel 12-6b on tuletõrjuja kujutatud punktina redeli joonel. Talle mõjuv raskusjõud on kujutatud vektorina , mida on nihutatud jõu mõjumissihis nii, et selle algus ühtib tuletõrjujat kujutava punktiga. (Selline nihe ei muuda jõu momenti suvalise telje suhtes.)
Ainus jõud, mis mõjub redelile seina poolt, on horisontaalne jõud (hõõrdevaba sein ei saa põhjustada hõõrdejõudu.) Sillutise poolt redelile mõjuval jõul on horisontaalne komponent , mis on seisuhõõrdejõud, ja vertikaalkomponent , mis on normaaljõud.
Tasakaaluvõrrandite rakendamist alustame võrrandist 12-9 (). Telje valimisel, mille suhtes jõumomente arvutada, paneme tähele, et tundmatuteks jõududeks on redeli otstesse rakendatud jõud ( ja ).
Selleks et elimineerida arvutustest näiteks , valime joonisega ristuva telje punkti läbivana. Valime punkti ka -koordinaadisüsteemi alguseks. Jõumomente punkti suhtes võib arvutada valemitega 10-39 kuni 10-41; antud juhul on kõige lihtsam kasutada valemit 10-41 ().
Jõu õla leidmiseks joonistame välja selle jõu mõjumissihi (horisontaalne kriipsjoon joonisel 12-6b). Siis on punktist sellele sirgele tõmmatud ristlõigu pikkus. Joonisel 12-6b asetseb see lõik -teljel ja tema pikkus on võrdne redeli ülemise otsa kõrgusega . Sarnaselt joonistame välja jõudude ja mõjumissihid ja täheldame, et nende jõudude õlad asetsevad -teljel. Joonisel 12-6a tähistatud vahemaa kaudu on nende jõudude õlad vastavalt (tuletõrjuja on poolel redeli kõrgusel) ja (redeli massikese on redeli alumisest otsast redelipikkuse kaugusel). Jõudude ja õlad on nullid.
Esitades jõumomendid kujul , omandab tasakaaluvõrrand kuju
(Meenutame meie reeglit: positiivne jõumoment vastab vastupäeva ja negatiivne päripäeva pöörlemisele.)
Kasutades Pythagorase teoreemi, leiame
Võrrand 12-19 annab seejärel
Nüüd tuleb meil kasutada jõudude tasakaalu võrrandeid. Võrrand annab seose
seega
millest
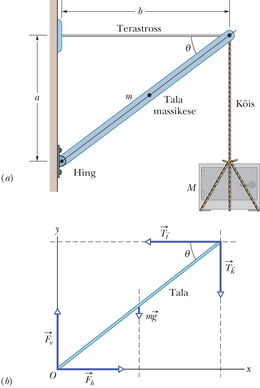
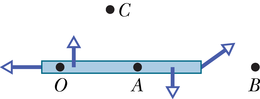
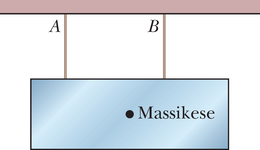
Joonisel 12-7 on kujutatud seifi massiga rippumas köie otsas konsooli küljes, mille mõõtmed on ja . Konsool koosneb ühest otsast hingega kinnitatud talast ja horisontaalsest trossist. Ühtlase tala mass on ; trossi ja köie masse pole vaja arvestada.
Lahendus
JUHTMÕTTED Süsteemiks on antud juhul tala üksi ja sellele mõjuvad jõud on näidatud vektordiagrammil joonisel 12-7b. Trossi poolt mõjuv jõud on . Talale mõjuv raskusjõud on rakendatud tema massikeskmesse (tala keskel) ja kujutatud vektorina . Hinge poolt talale mõjuva jõu vertikaalkomponent on ja horisontaalkomponent on . Seifi hoidva köie poolt mõjuv jõud on . Kuna tala, köis ja seif on paigal, siis on jõu suurus võrdne seifi kaaluga: . Valime hinge asukoha -koordinaadistiku alguseks. Kuna süsteem on tasakaalus, siis on rakendatavad tasakaaluvõrrandid.
Arvutused: Alustame võrrandist 12-9 (). Paneme tähele, et meilt küsitakse jõudu , aga mitte hingele mõjuvaid jõudusid ega . Kõrvaldamaks jõudusid ja jõumomentide arvutustest, peaksime arvutama momente telje suhtes, mis läbib punkti ja on risti joonise tasandiga. Siis on jõudude ja õlad nullid. Jõudude , ja mõjumissihid on joonisel 12-7b esitatud kriipsjoontega. Vastavate jõumomentide õlad on , ja b/2.
Kirjutades jõumomendid välja kujul ja kasutades meie reeglit momentide märkide määramiseks, omandab tasakaaluvõrrand kuju
(b)
Lahendus
JUHTMÕTE Nüüd huvitavad meid ja , sest neist saab leida jõu suuruse . Kuna meil nüüd on teada , rakendame talale jõudude tasakaalu võrrandeid.
Arvutused: Horisontaalsete jõudude tasakaalu jaoks saab võrrand kuju
seega
Vertikaalsete jõudude tasakaalu jaoks kirjutame võrrandi välja kujul
Asendades sellesse väärtuse ja lahendades võrrandi suhtes, saame
Pythagorase teoreemist saame nüüd
Paneme tähele, et on oluliselt suurem kui seifi ja tala kogukaal () või pingejõud horisontaalses trossis ().
Näidisülesanne 12-4
Lahendus
JUHTMÕTE Kuna torn seisab peaaegu liikumatult, on ta tasakaalus ja seega peab jõumomentide summa suvalise punkti suhtes olema null.
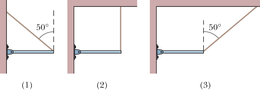
Arvutused: Kuna tahame arvutada paremal mõjuva jõu suurust ja me ei tea ega tahagi teada vasakul mõjuvat jõudu , valime jõumomentide arvutamiseks telje läbi vasaku toetuspunkti. Püstisele tornile mõjuvad jõud on kujutatud joonisel 12-8c. Massikeskmesse rakendatud raskusjõu mõjumissiht on vertikaalne ja jõu õlg (pöörlemisteljest mõjumissihile tõmmatud ristlõigu pikkus). Selle jõuga seotud moment püüab pöörlemistelje ümber tekitada pöörlemist päripäeva ja on seega negatiivne. Lõunapoolsele seinale mõjuva normaaljõu mõjumissiht on samuti vertikaalne ja tema õlg on . Selle jõuga seotud moment püüab tekitada pöörlemist vastupäeva ja on seega positiivne. Võime nüüd välja kirjutada jõumomentide taskaalu võrrandi () kujul
millest
Selle tulemuse oleksime võinud ka ära arvata: kui massikese asetseb silindri telgjoonel (silindri sümmeetriateljel), toetab parem pool poolt silindri kaalust.
Joonisel 12-8b on massikese nihkunud paremale vahemaa
võrra. See toob kaasa muutused jõumomentide tasakaalus: nüüd on raskusjõu õla suurus ja parempoolsel normaaljõul on uus väärtus (joonis 12-8d). Seega võime kirjutada
mis annab meile
Jagades võrduse 12-21 võrdusega 12-20 ja asendades siis , saame
Asetades siia väärtused , ja , saame
Seega meie lihtne mudel ennustab, et kuigi torni kalle on tagasihoidlik, on tema lõunapoolsele seinale mõjuv normaaljõud kasvanud 30. Torni ähvardab oht, et see jõud võib tekitada lõunaseina painde ja sellest tingitud väljavarisemise.
Juhis 1: Staatilise tasakaalu ülesanded
Siin on nimekiri sammudest staatilise tasakaaluga seotud ülesannete lahendamisel:
- Tehke ülesande kohta joonis.
- Valige süsteem, millele rakendate tasakaaluseadusi, ja ümbritsege see joonisel suletud kõveraga, et teda selgesti meelde jätta. Mõnel juhul võib selliseks süsteemiks olla mõni üksikobjekt, mida soovite näha tasakaalus. Teistes situatsioonides võite süsteemi juurde arvata täiendavaid objekte, kui nende lisamine lihtsustab tasakaalu arvutamist. Näiteks oletagem, et näidisülesandes 12-2 valinuksite süsteemiks vaid redeli. Siis pidanuksite joonisel 12-6b arvestama täiendavaid tundmatuid jõude, millega tuletõrjuja käed ja jalad mõjuvad redelile. Need lisatundmatud muudavad arvutamise keerukamaks. Joonisel 12-6 oli süsteem valitud nii, et need tundmatud jõud olid süsteemi sisejõud ja seetõttu polnud neid näidisülesande 12-2 lahendmiseks vaja leida.
- Joonistage süsteemile mõjuvate jõudude vektordiagramm. Kandke sellele kõik jõud, mis mõjuvad süsteemile, ja hoolitsege, et nende rakenduspunktid ja mõjumissihid on õigesti näidatud.
- Joonistage välja koordinaadisüsteemi x-telg ja y-telg, valides vähemalt ühe telje paralleelseks ühe või enama tundmatu jõuga. Jõud, mis pole paralleelsed ühegi teljega, lahutage komponentideks. Kõigis meie näidisülesannetes oli mõttekas valida x-telg horisontaalsena ja y-telg vertikaalsena.
- Kirjutage välja kaks jõudude tasakaalu võrrandit, kasutades sissetoodud tähiseid.
- Valige üks või enam joonise tasandiga ristuvat pöörlemistelge ja kirjutage iga telje jaoks välja jõumomentide tasakaalu võrrand. Kui valite telje, mis läbib mingi tundmatu jõu mõjumissihti, siis võrrandid lihtsustuvad, kuna seda jõudu neis ei sisaldu.
- Lahendage võrrandid tundmatute suhtes algebraliselt. Mõned õppurid tunnevad end kindlamini, kui asetavad numbrilised väärtused koos ühikutega juba algvõrranditesse, eriti kui järgnev algebra on keerukas. Kogenud lahendajad aga eelistavad algebrat, mis teeb läbinähtavaks lahendi sõltuvuse erinevatest parameetritest.
- Lõpuks asetage saadud algebralisse lahendisse numbrilised väärtused koos ühikutega ja arvutage otsitavate tundmatute väärtused.
- Vaadake saadud tulemust – on see mõistlik? On see silmnähtavalt liiga suur või liiga väike? Kas ühikud on õiged?
Selle peatüki ülesannete jaoks on meie kasutuses vaid kolm sõltumatut võrrandit, harilikult kaks jõudude tasakaalu võrrandit ja üks jõumomentide tasakaalu võrrand antud pöörlemistelje suhtes. Seega kui ülesandes on enam kui kolm tundmatut, ei saa me teda lahendada.
Selliseid ülesandeid on lihtne leida. Näidisülesandes 12-2 võiksime näiteks eeldada, et seina ja redeli ülemise otsa vahel on olemas hõõre. Siis oleks lisandunud vertikaalne hõõrdejõud, mis oleks rakendatud punkti, kus redel toetub vastu seina, seega oleks kokku neli tundmatut jõudu. Ainult kolme võrrandi abil poleks me saanud seda ülesannet lahendada.
Vaatleme ebasümmeetriliselt koormatud autot. Millised jõud – kõik erinevad – mõjuvad neljale rehvile? Jällegi ei saa me neid leida, sest meil on vaid kolm sõltumatut võrrandit. Niisamuti saame me lahendada kolme jalaga laua tasakaalu ülesande, ei saa seda aga teha nelja jalaga laua korral. Selliseid ülesandeid, kus tundmatuid on rohkem kui võrrandeid, nimetatakse määramatuteks.
Reaalses maailmas aga on määramatutel ülesannetel lahendused olemas. Kui auto iga ratas on asetatud eraldi platvormkaalule, annab iga kaal kindla lugemi, millede summa võrdub auto kaaluga. Mis libiseb meil käest, kui püüame leida üksikuid jõudusid võrrandite lahendamise teel?
Küsimus on selles, et oleme eeldanud – seda eriti rõhutamata –, et kehad, millele me oma staatilise tasakaalu võrrandeid rakendame, on ideaalselt jäigad. Selle all peame silmas, et nad ei deformeeru rakendatud jõudude mõjul. Rangelt rääkides pole selliseid kehasid olemas. Näiteks auto rehvid deformeeruvad kergesti koormise mõjul, kuni auto saavutab staatilise tasakaaluoleku.
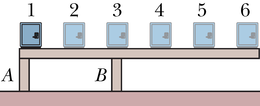
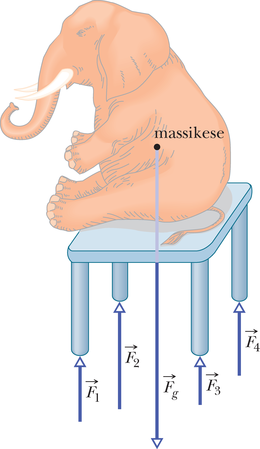
Oleme kõik kokku puutunud kõikuva söögilauaga, mille me harilikult stabiliseerime, asetades ühe jala alla kokkumurtud paberi. Kui aga sellisele kõikuvale söögilauale istuks piisavalt suur elevant, võite olla kindlad, et laud, kui ta just kokku ei varise, deformeerub nagu auto rehvidki. Kõik laua jalad puudutaksid põrandat, jalgadele mõjuvad ülespoole suunatud jõud omandaksid kindlad (ja erinevad) väärtused nagu näidatud joonisel 12-9 ja laud ei kõiguks enam. Kuidas saaksime leida jalgadele mõjuvate jõudude suurused?
Selliste määramata tasakaaluülesannete lahendamiseks peame me täiendama tasakaaluvõrrandeid, lisades mõningaid teadmisi elastsusteooriast – füüsika ja inseneriteaduste harust, mis kirjeldab, kuidas reaalsed kehad deformeeruvad, kui neile on rakendatud jõud. Järgnev osa annab sissejuhatuse sellesse ainevalda.

KONTROLLKÜSIMUS 3
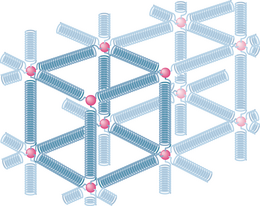
Kui suur hulk aatomeid koguneb kokku moodustamaks metallist tahkist, näiteks raudnaela, paigutuvad nad tasakaaluasenditessse kolmemõõtmelises võres, korduvas struktuuris, milles iga aatom asetseb oma lähinaabritest määratletud tasakaalulisel kaugusel. Aatomeid hoiavad koos aatomitevahelised jõud, mis joonisel 12-10 on kujutatud väikeste vedrudena. Selline võre on märkimisväärselt jäik, mis teisisõnu tähendab, et „aatomitevahelised vedrud” on äärmiselt jäigad. Sel põhjusel tajume me paljusid igapäevaseid esemeid, nagu metallredelid, lauad ja lusikad, ideaalselt jäikadena. Muidugi, mõned tavaesemed nagu aiavoolikud või kummikindad ei tundu meile üldsegi jäikadena. Aatomid, millest sellised objektid koosnevad, ei moodusta jäika võret nagu joonisel 12-10, vaid on joondunud pikkadesse painduvatesse molekulaarahelatesse; iga selline ahel on vaid lõdvalt seotud oma naabritega.
Kõik reaalsed „jäigad” kehad on mingi määral elastsed, mis tähendab, et me saame nende mõõtmeid venitades, tirides, väänates või kokku surudes pisut muuta. Saamaks ettekujutust asjassepuutuvaist suurusjärkudest, vaatleme pikkust terasvarrast läbimõõduga , mis on kinnitatud töökoja lakke. Kui sellise varda otsa riputada väikeauto, pikeneb varras vaid ehk võrra. Kui auto eemaldada, taastub varda esialgne pikkus.
Kui varda otsa riputada kaks autot, venib varras välja pöördumatult ega taasta oma algpikkust, kui koormis eemaldada. Kui riputada varda otsa kolm autot, siis varras puruneb. Vahetult enne purunemist on varda pikenemine väiksem kui . Kuigi sellise suurusega deformatsioonid näivad pisikestena, on nad tähtsad inseneripraktikas. (See, kas koormatud lennukitiib püsib lennuki küljes, on ilmselgelt oluline.)
Joonisel 12-11 on kujutatud kolm võimalust, kuidas tahke keha võib oma kuju muuta, kui talle mõjuvad jõud. Joonisel 12-11a on silindrit venitatud.
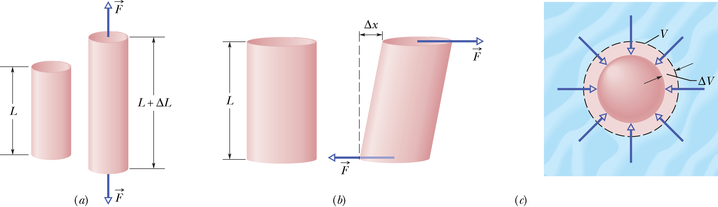
Joonisel 12‑11b on silindrit deformeeritud silindri teljega risti oleva jõu poolt, nii nagu me võiksime deformeerida kaardipakki või pehmeköitelist raamatut. Joonisel 12-11c on kõrge rõhu all olevasse vedelikku asetatud tahke keha kõikidest külgedest ühtlaselt kokku surutud. Kõigile kolmele deformatsioonitüübile on iseloomulik, et pinge (deformeeriv jõud ühikulise pinna kohta) põhjustab deformatsiooni (mõõtmete suhtelise muutuse). Joonisel 12‑11 on kujutatud (a) tõmbepinget (seotud venitusega), (b) nihkepinget ja (c) hüdraulilist pinget.
Pinged ja deformatsioonid omavad joonisel 12-11 vaadeldud kolmes situatsioonis erinevaid kujusid, aga inseneripraktikas enamasti esinevatel väärtustel on pinge ja deformatsioon teineteisega võrdelised. Võrdetegurit nimetatakse elastsusmooduliks, nii et
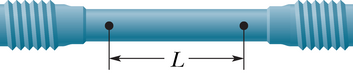
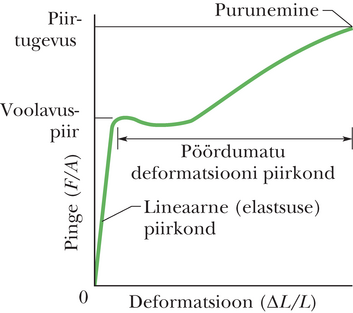
Tõmbeomaduste standardtestis rakendatakse katsesilindrile (joonis 12-12) tõmbepinget, mis kasvab aeglaselt nullist kuni väärtuseni, kus silinder puruneb; vastav deformatsioon mõõdetakse ning kantakse graafikule. Tulemuseks on joonisel 12-13 kujutatu taoline pinge-deformatsioonidiagramm. Rakendatud pinge märkimisväärses vahemikus on pinge ja deformatsiooni seos lineaarne ning katsekeha taastab oma esialgsed mõõtmed, kui pinge kõrvaldatakse; see on piirkond, kus kehtib võrdus 12‑22. Kui pinget on suurendatud üle voolavuspiiri , deformeerub katsekeha jäädavalt. Kui pinget edasi suurendada, puruneb katsekeha lõpuks pingel , mis kannab piirtugevuse nimetust.
Lihtsa venituse või surve korral on objektile mõjuv pinge määaratletud kui , kus on jõu suurus, mis on rakendatud risti objekti pinnaga pindalale . Deformatsioon on katsekeha pikkuse suhteline muutus , mis on suhtearvuna mõnikord väljendatud protsentides. (Selliseid füüsikalisi suurusi, mille väärtuseks on puhtakujulised arvud, nimetatakse ühikuteta ehk dimensioonituteks suurusteks.) Kui katsekeha on pikk varras ja pinge ei ületa voolavuspiiri, siis mõjub mitte ainult vardale tervikuna, vaid ka selle igale ristlõikele sama suur pinge kui vardale rakendatud. Kuna deformatsioon on dimensioonitu, siis on moodulil valemi 12‑22 kohaselt pinge dimensioon – jõud ühikulise pindala kohta.
Moodulit venitus- ja survepinge jaoks kutsutakse Youngi mooduliks ja inseneripraktikas tähistatkse seda sümboliga . Võrdus 12-22 omandab siis kuju
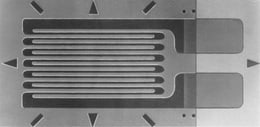
Deformatsiooni on sageli mugav mõõta deformatsioonimõõdikuga (joonis 12-14). Selle lihtsa ja kasuliku riista saab liimiga vahetult kinnitada uuritava seadme külge ja tema töö põhineb asjaolul, et ta elektrilised omadused sõltuvad ta deformatsioonist.
Kuigi mingi objekti Youngi moodul võib olla peaaegu ühesuurune nii venituse kui surve jaoks, võib objekti piirtugevus eri deformatsioonitüüpide puhul oluliselt erineda. Näiteks betoon on surve korral väga tugev, aga venituse korral nii nõrk, et teda peaaegu kunagi niiviisi ei kasutata. Tabelis 12-1 on toodud mõnede praktilist huvi pakkuvate materjalide Youngi moodulid ja muud elastsusomadused.
Ka nihke korral määratletakse pinge kui jõud rakenduspinna ühiku kohta, kuid jõu vektor asetseb sel juhul mõjutataval pinnal, mitte ei ole sellega risti. Deformatsioon on joonisel 12-11b toodud suuruste dimensioonitu suhe . Vastav moodul, mida inseneripraktikas tähistatakse sümboliga , kannab nihkemooduli nimetust. Nihke korral omandab võrdus 12-22 kuju
Nihkepingetel on kriitiline osa pöörlevate koormatud võllide purunemises ja paindumisest põhjustatud luumurdude korral.
Joonisel 12-11c on pingeks vedeliku poolt objektile mõjuv rõhk , kus rõhk on jõud ühikulisele pinnale, nagu seda seletatakse 14. peatükis. Deformatsioon on , kus on katsekeha algruumala ja on ruumala muutuse absoluutväärtus. Vastav moodul, mille tähiseks on , kannab materjali ruummooduli nimetust. Öeldakse, et objekt on allutatud hüdraulilisele survele ja rõhku võib nimetada hüdrauliliseks pingeks. Selle juhu jaoks võime võrrandi 12-22a esitada kujul
Vee ruummoodul on , terasel . Rõhk Vaikse ookeani põhjas keskmisel sügavusel 4000m on . Vee ruumala suhteline muutus selle rõhu mõjul, , on , terasest objektidel vaid . Üldiselt on tahkised – oma jäikade aatomvõredega – vähem kokku surutavad kui vedelikud, kus aatomid pole nii tihedasti seotud oma naabritega.
Näidisülesanne 12-5
Lahendus
JUHTMÕTTED (1) Pinge on jõu suuruse ja rakenduspindala suhe, võrduse 12-23 vasak pool. (2) Pikenemine on antud pinge ja Youngi mooduli kaudu seosega 12-23 (). (3) Deformatsioon on pikenemise ja esialgse pikkuse suhe.
Arvutused: Pinge leidmiseks kirjutame
Konstruktsiooniterase voolavuspiir on , seega on see varras voolavuspiirile ohtlikult lähedal.
Leiame tabelist 12-1 terase Youngi mooduli. Võrdusest 12-23 leiame pikenemise
Deformatsiooni jaoks saame
Näidisülesanne 12-6
Lahendus
JUHTMÕTTED Vaatleme süsteemina lauda koos terassilindriga. Situatsioon on sarnane joonisel 12-9 kujutatule, erinevuseks vaid laual asetsev terassilinder. Kui lauapind jääb horisontaalseks, peavad jalad olema kokku surutud järgmiselt: kõik lühikesed jalad on kokku surutud sama suuruse võrra (olgu selle tähiseks ) ja seega ka sama suurte jõududega ; üksik pikem jalg on kokku surutud rohkem (suuruse võrra) ja seega ka suurema jõu poolt. Teisisõnu, horisontaalse lauapinna saavutamiseks peab meil olema
Võrduse 12-23 abil saame siduda pikkuse muutuse seda põhjustava jõuga kui , kus on lauajala algpikkus. Viimast seost saame kasutada ja asendamiseks võrrandis 12-26. Paneme tähele, et laua kõigi jalgade algpikkuse jaoks võime lähendina kasutada sama suurust .
Arvutused: Tehes need asendused ja kasutades nimetatud lähendust, saame
Seda võrrandit ei saa me lahendada, kuna ta sisaldab kahte tundmatut, ja .
Teise jõudusid ja sisaldava võrrandi saamiseks võime kasutada vertikaalset -telge ja kirjutada välja taskaaluvõrrandi vertikaalsete jõudude jaoks () kujul
kus võrdub süsteemile mõjuva raskusjõuga. (Kolmele jalale mõjub jõud .) Lahendamaks võrrandite 12-27 ja 12-28 süsteemi näiteks jaoks, kasutame esmalt võrrandit 12-28 ja leiame, et . Asetades selle võrrandisse 12-27, saame pärast mõningaid algebralisi teisendusi
Võrrandist 12-28 leiame seejärel
Võite näidata, et tasakaaluasendi saavutamisel on lühikesed jalad kokku surutud ja pikk jalg võrra.
Elastsusmoodulid
Elastsusmoodulid Kehade elastse käitumise (deformatsiooni) kirjeldamiseks on kasutusel kolm elastsusmoodulit, mis määravad kehade reaktsiooni neile mõjuvatele jõududele. Deformatsioon (pikkuse suhteline muutus) on lineaarses sõ