Füüsikalistest mudelitest oli meil natuke juba eespool juttu (p.1.1.4). Füüsikaline mudel rõhutab loodusobjekti neid omadusi, mis on antud kontekstis olulised. Siin vaatleme mudeleid lähemalt, alustades mudeli üldisest määratlemisest. Loodusteadustes nimetatakse üldiselt mudeliks (ld modulus – näidis) loodusobjekti jäljendust, mis asendab originaali selle lihtsamaks mõistmiseks ning uurimiseks. Kuna füüsikalist suurust kui mudelit on esmapilgul raske sobitada selle definitsiooni alla, siis paljud ka ei mõista, et füüsikaline suurus on looduse mudel. Meenutagem jälle, et käesolevas õpikus liigitatakse looduse objektide hulka mitte ainult kehad ja väljad, vaid ka looduses toimuvad protsessid ehk loodusnähtused (sõna objekt lai tähendus), sest vaatleja kui subjekt tegeleb ühteviisi nende kõigiga. Me teame, et füüsikalises uurimistöös on tähtsal kohal vaatlus. Vaatleja loob endale uuritavast objektist või nähtusest kujutluse. Seejuures on tal palju abi mudelitest kui lihtsustustest. Mudeli saab luua mistahes makrokehast, vee molekulist, lihtaine aatomist, elektromagnetlainest või koguni Päikesesüsteemist ja tervest meie Galaktikast. Modelleerida saab aga ka füüsikalisi nähtusi nagu elektrivool, auto liikumine maanteel või valguse murdumine vihmapiisas.
-
![]() Vee molekulis on kaks vesiniku aatomit ning üks hapniku aatom, mida seob polaarne kovalentne side. See side on nii tugev, et molekul moodustab elektrilise dipooli. Dipoolsus on oluline vee omadus, mis võimaldab tekkida vesiniksidemetel ning seletab muu hulgas, miks vesi on hea lahusti. Sellepärast on pildil kujutatud vee molekuli mudel asjakohane.
Vee molekulis on kaks vesiniku aatomit ning üks hapniku aatom, mida seob polaarne kovalentne side. See side on nii tugev, et molekul moodustab elektrilise dipooli. Dipoolsus on oluline vee omadus, mis võimaldab tekkida vesiniksidemetel ning seletab muu hulgas, miks vesi on hea lahusti. Sellepärast on pildil kujutatud vee molekuli mudel asjakohane. -
![]() DNA plastikust mudel, mis näitab selle põhilisi struktuuriomadusi.
DNA plastikust mudel, mis näitab selle põhilisi struktuuriomadusi.


Kõikidele mudelitele on iseloomulik see, et nad ei jäljenda originaali kunagi täpselt. Originaali omaduste täpne edastamine mudelis pole juba sellepärast võimalik, et vaatleja ei pruugi üldse kõiki üksikasju näha. Pealegi puudub ideaalse täpsuse järele ka vajadus. Mudel edastab vaid originaali kõige olulisemaid tunnuseid ja omadusi. Mudel on lihtsustus, kus jäetakse arvestamata kõik antud kontekstis mitteoluline. Kõige üldisemaid loodusteaduslikke mudeleid, mida loob füüsika ja mida kasutavad kõik loodusteadused, nimetatakse füüsikalisteks mudeliteks.
Loodusteaduslikke, sealhulgas ka füüsikalisi mudeleid, liigitatakse tavaliselt ainelisteks ja abstraktseteks mudeliteks. Ainelisi mudeleid kasutatakse siis, kui uuritav objekt on palja silmaga vaatlemiseks kas liiga väike või liiga suur. Reeglina kujutab aineline mudel mikro- või megamaailma objekti. Sellise objekti aineline mudel aitab meil tekitada kujutlust vahetutele aistingutele kättesaamatust objektist. Vee molekuli suurendav mudel edastab käegakatsutaval viisil keemiliste sidemete vahelist spetsiifilist nurka (105°) selles molekulis koos hapniku ja vesiniku aatomite suuruste suhtega ning elektronpilve jaotusega. See võimaldab paremini mõista vee ja jää kristallstruktuuri moodustumist. Analoogiliselt aitab DNA molekuli mudel mõista geneetilise informatsiooni talletamist selles aines. Neid mudeleid kasutavad palju keemia ja bioloogia, aga nad on loodud füüsikaliste uurimismeetodite abiga ning teiste füüsikaliste mudelite baasil. Gloobus kui Maa vähendatud mudel võimaldab paremini aru saada öö ja päeva vaheldumisest. Süsteemi Maa-Kuu-Päike mehaaniline mudel aitab paremini mõista aastaaegade vaheldumist Maal ning kuu- ja päikesevarjutuste teket. Ka need mudelid on algselt loonud füüsika, kuid neid kasutab laialdaselt geograafia.
Aineliste mudelite spetsiifilise alaliigina võib vaadelda pildilisi mudeleid. Nende korral pole modelleeritavast objektist tehtud reaalset kolmemõõtmelist vähendatud või suurendatud osalist koopiat. Seda koopiat on vaid kujutatud kahemõõtmelisel joonisel, mis rõhutab originaali neid omadusi, mis on mudeli looja jaoks olulised. Tänapäeval kasutatakse üha rohkem ka arvutimudeleid ehk animatsioone. Need on järjestikuste piltide seeriad ehk videod, arvuti-eelsel ajastul nimetatud ka filmideks. Loodusteaduslikud arvutimudelid võimaldavad kas ühte ja sedasama loodusobjekti vaadelda erinevates vaadetes ehk rakurssides või siis jälgida loodusnähtuse ehk protsessi arengut läbi protsessi kirjeldavate järjestikuste kujutiste. Arvutite riist- ja tarkvara areng on võimaldanud kaasajal üha rohkem kasutada ka interaktiivseid arvutimudeleid, mille korral mudeli kasutaja saab ise mudeli tingimusi varieerida ja seeläbi paremini tunnetada looduses valitsevaid põhjuslikke seoseid.
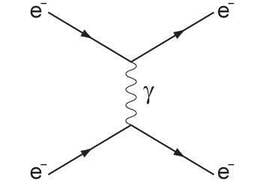
Juhul, kui loodusobjekti uuritakse ja kirjeldatakse mitte ainelise mudeli, vaid mõtteliste kujutluste ning neid väljendavate matemaatiliste avaldiste abil, on tegemist abstraktse mudeliga (ld abstractus – mõtteline). Abstraktne mudel on objekti mõtteline visioon, kontseptsioon objektist mõtleva inimese teadvuses. Vaatleja suudab abstraktseid mudeleid luua vaid seetõttu, et tal on olemas mõistus ehk süllogismide moodustamise võime (p.1.2.1). Füüsika üldmudelid, millega me tegeleme terves järgmises peatükis, on samuti looduse abstraktsed mudelid. Nende hulgas omavad erilist tähtsust füüsikalised suurused. Füüsika üldmudelid on enamasti kehade või väljade omadusi kirjeldavad mudelid, ehk küll leidub ka protsesse kirjeldavaid füüsikalisi suurusi kui mudeleid (nt kiirus, kiirendus, töö või võimsus). Praegu keskendume aga mitte üksikutele füüsikalistele suurustele, vaid suuruste vahel valitsevate seostele.

Selleks, et ennustada, millal jõuab rong järgmisse jaama, pole vaja kasutada rongi ainelist mudelit ehk laste mängurongi. Me võime tõelist rongi lihtsalt ette kujutada. Seejuures pole üldse tähtis, kui mitmest, kui pikast ning millist värvi vagunist see rong koosneb. Lõppjaama jõudmise aja ennustamisel pole oluline, milline rong välja näeb. Tähtis on vaid see, kus rong asub erinevatel ajahetkedel. On vaja teada rongi asukoha sõltuvust ajast. Sellise ülesande puhul piisab, kui kujutame tervet rongi ette vaid punktina, millel mõõtmed puuduvad. Rongi mõõtmed, kuju ja muud omadused pole hetkel olulised. Oluline on vaid see, kus asub rongi tähistav punkt ja kuidas selle punkti asukoht aja jooksul muutub. Ühe punktina kujuteldav rong, auto või lennuk on tuntud füüsika üldmudelina, millel nimeks punktmass. Selle mudeliga tegeleme peagi lähemalt (p.3.1.2). Praegu nendime vaid, et rongi liikumise modelleerimiseks piisab, kui lihtsalt kujutame selle liikumist ette ja esitame matemaatilise valemi, mis võimaldab leida rongi asukoha mistahes ajahetkel.
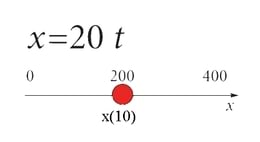
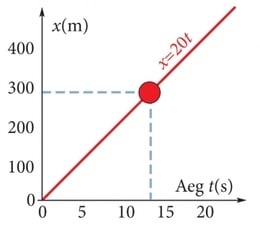
Rongi liikumise visiooni ehk mõttekujundi abstraktseks mudeliks on matemaatiline avaldis, mis lubab liikumisoleku omadusi teades välja arvutada rongi kaugust lähtejaamast mistahes võimalikul ajahetkel. Kui rongi kaugust lähtejaamast (avaldatuna meetrites) tähistada tähega x ja sekundites avaldatud aega, mis on möödunud liikumahakkamisest – tähistada tähega t, siis väljendab selle rongi liikumist näiteks avaldis x = 20 t. See avaldis ongi rongi liikumist kirjeldav matemaatiline mudel.
Matemaatilisele avaldisele tuginevat loodusnähtuse (nt rongi liikumise) kirjeldust nimetatakse analüütiliseks mudeliks. Rongi asukoha sõltuvust ajast saab peale matemaatilise valemi väljendada ka graafiku abil. Sel puhul on tegemist loodusnähtuse graafilise mudeliga. Olgu veel märgitud, et rongi kaugus lähtejaamast ja rongi poolt läbitud teepikkus on üks ja seesama asi. Teepikkusega s oleme aga juba kokku puutunud põhikooli füüsika mehaanika osas.
Analüütilise mudeli loomist alustame rongi liikumise sihipärasest vaatlusest, millega kaasneb mõõtmine. Olgu meil näiteks raudteel iga kilomeetriposti juurde paigutatud fotovärav ehk seade, mis fikseerib rongi jõudmise selle konkreetse postini. Fotoväravatest lähevad signaalid mõõtja arvutisse, mille kell fikseerib iga signaali saabumisaja. Moodustub andmefail, mis sisaldab lähtejaamast alates loendatud kilomeetripostide järjekorranumbreid, postide kaugusi lähtejaamast ja rongi jõudmiseks vastava kilomeetripostini kulunud aegu. Arvuti võib olla programmeeritud väljastama neid andmeid otsekohe alljärgneva tabeli kujul, kus füüsikaliste suuruste tähiste järel on sulgudes toodud mõõtühik.
Mõistagi tuleks kõigile mõõteväärtustele lisada mõõtemääramatused. Kaasaegsete arvutipõhiste mõõtesüsteemide kasutamise korral on mõõtemääramatuste hindamine omaette mahukas teema, mistõttu me seda siin praegu arendama ei hakka. Kui me aga teostame mingit samalaadset mõõtmist käepäraste mõõtevahenditega, siis hindame mõõtemääramatusi analoogiliselt ülalpool (p.2.4.3) kirjeldatuga ning kanname mõõteväärtused koos mõõtemääramatustega omajoonistatud tabelisse.
Meie järgmiseks tegevuseks on andmetöötlus. Selleks koostame kõigepealt graafiku, mille horisontaalsele ehk matemaatiliselt väljendudes abstsissteljele märgime aja t väärtused (joonis 2.4). Vertikaalsele ehk ordinaatteljele kanname kaugused lähtejaamast x (või läbitud teepikkused s). Näeme, et graafik on tõusev sirge, mis läbib koordinaatide alguspunkti. Matemaatikast teame, et sel juhul on tegemist võrdelise sõltuvusega ehk lineaarfunktsiooniga y = a x, kus y on funktsioon ja x – argument. Meie mudelis on argumendiks aeg t ja funktsiooniks läbitud teepikkus s. Seega meie juhul s = v t, kuna põhikooli mehaanikast me juba teame, et
Tabelist näeme ka, et graafiku mistahes punkti järgi arvutades saame konstantse kiiruse v = 20 m/s. Konstantse kiirusega toimuvat liikumist nimetatakse füüsikas ühtlaseks liikumiseks. Vaadeldes läbitud teepikkust s kaugusena lähtejaamast x ehk suurusena, mida Mehaanika kursuses nimetatakse koordinaadiks, olemegi saanud rongi liikumise protsessi analüütilise mudeli, mida Mehaanika kursuses nimetatakse liikumisvõrrandiks:
Liikumisvõrrand võtab kõige kompaktsemalt ja üldisemalt kokku meie üksikud katsetulemused. Jääb veel üle küsida – miks me ikkagi nimetame kõike ülaltoodut mudeliks? Kas konstantse kiirusega liikuv rong on siis nii keeruline loodusobjekt? Asja üle pisut järele mõeldes peame tõdema, et rongi nii pikaajalist ühtlast liikumist esineb tõepoolest harva. Teeolud on muutlikud ja vastavalt neile muudab vedurijuht tegelikkuses rongi kiirust. Seega on rangelt ühtlaselt liikuv rong tõepoolest idealiseeritud objekt, on looduse mudel.
Tekib ka küsimus, mis meil loodud mudelist kasu on? Oletagem, et meid huvitab, kas uuritav rong võib 15 minuti jooksul jõuda järgmisesse jaama, mis on lähtejaamast 20 km kaugusel. Asendame aja t = 15 . 60 s = 900 s liikumisvõrrandisse ja saame:
Seega vastus püstitatud küsimusele on eitav. Rong läbib 15 minuti jooksul 18 km ja ei jõua veel jaama, mis paikneb 20 km kaugusel lähtejaamast.