Nagu varem öeldud, keskendub füüsika kõigepealt liikumise uurimisele. Aga siiani oleme vaadelnud üksnes kulgevat (translatoorset) liikumist, kus keha liigub piki sirget või kõverat joont, nagu seda teeb uisutaja joonisel 10-1a. Nüüd koondame tähelepanu pöörlevale liikumisele, kus keha pöördub ümber telje nii, nagu näha joonisel 10-1b.

|

|
|---|---|
| JOONIS 10-1a Iluuisutaja Sasha Cohen liigub kulgevalt piki sirgjoont. | JOONIS 10-1b Iluuisutaja Sasha Cohen pöörleb ümber vertikaalse telje. |
Te näete pöörlemist peaaegu igas masinas, te kasutate seda iga kord, kui avate joogipurki, ja maksate selle eest alati, kui külastate tivolit. Pöörlemine kuulub paljude meelelahutuste juurde, nagu näiteks pika palli löömisel golfimängus (pall pannakse pöörlema eesmärgiga pikendada selle õhus püsimise aega) või vindipalli löömisel pesapallimängus (pöörlevale pallile mõjuv õhutakistus sunnib seda lennu ajal vasakule või paremale pöörduma). Pöörlemine aitab mõista keerukaid nähtusi, nagu näiteks metallikahjustusi vanades lennumasinates.
Järgides teises peatükis kulgeva liikumise uurimisel kasutatud metoodikat, alustame ka pöörlemise õppimist muutujate defineerimisest.
Meie eesmärgiks on kirjeldada jäiga keha pöörlemist ümber kindla telje. Jäigaks kehaks nimetame sellist keha, mille kõik osad on üksteisega seotud nii, et keha kuju muutumine ei ole võimalik. Kindel telg tähendab seda, et pöörlemistelg ei saa oma asendit muuta. Selle meetodiga ei saa uurida selliseid kehasid nagu Päike, kuna gaasist kera ei ole jäik ja tema osad ei ole üksteise küljes kinni. Ka ei saa me sel teel uurida veerevat keeglikuuli, kuna see pöörleb ümber liikuva telje (kuuli liikumine on segu pöörlevast ja kulgevast liikumisest).
Joonisel 10-2 näeme suvalise kujuga jäika keha pöörlemas ümber kindla sirge, mida nimetatakse pöörlemisteljeks. Kui tegu on puhta pöörlemisega (nurga muutumisega), siis liigub selle keha iga punkt piki ringjoont, mille keskpunkt asub pöörlemisteljel; seejuures pöördub keha iga punkt teatud ajavahemiku jooksul ühe ja sama nurga võrra. Puhta kulgliikumise (sirgliikumise) korral liigub keha iga punkt piki sirgjoont ja tema kõik punktid läbivad kindla ajavahemiku jooksul võrdsed nihked (ühepikkused sirglõigud).
Järgnevalt määratleme sirgliikumist kirjeldavate suuruste – asukoha, nihke, kiiruse ja kiirenduse – analoogid pöördliikumise jaoks.
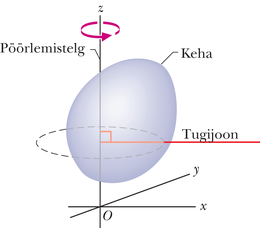
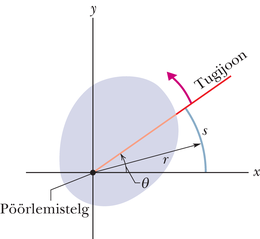
Joonisel 10-2 näete nn tugijoont, mis on kehaga seotud, asub pöörlemisteljega risti ja pöörleb koos kehaga. Selle joone asendi määrab tema nurk mingi etteantud suunaga, mida me käsitleme kui nullasendit. Joonisel 10-3 määrab asendi tugijoone nurk -telje positiivse suunaga. Geomeetriast teame, et nurga väärtus on antud valemiga
Siin tähistab ringjoone kaare pikkust -teljest kuni tugijooneni ja selle ringjoone raadiust.
Sel kombel defineeritud nurgamõõtu nimetatakse mõõduks radiaanides (rad) ja see erineb nii pöörete arvust kui mõõdust kraadides. Kuna radiaan on kahe pikkuse suhe, siis ei ole tal omaette ühikut – ta on puhtakujuline arv. Kuivõrd raadiusega ringjoone pikkus on , siis on üks täispööre võrdne radiaaniga:
ja seega
Kui tugijoon teeb ümber pöörlemistelje täispöörde, ei võta me nurka võrdseks nulliga, vaid θ=2πrad. Kui tugijoon on teinud kaks täispööret, siis on asendit määrav nurk θ=4πrad.
Sirgliikumisel piki -telge määrab keha asukoha suvalisel ajahetkel funktsioon , st asukoha sõltuvus ajast. Niisamuti määrab pöörleva keha asendi suvalisel ajahetkel funktsioon θ(t), st tugijoone nurga sõltuvus ajast.
Kui joonisel 10-3 kujutatud keha on pöördunud ümber telje joonise 10-4 kohaselt, see tähendab, tugijoone ning -telje vahelise nurga väärtus on kasvanud väärtuselt θ1 väärtuseni θ2, siis on keha asend muutunud pöördenurga Δθ=θ2−θ1
Siin toodud pöördenurk käib mitte ainult pöörleva keha kui terviku, vaid ka selle keha ükskõik missuguse osa (temasse kuuluva punktmassi) kohta.
Kui keha liigub kulgevalt piki -telge, võib tema nihe olla kas positiivne või negatiivne sõltuvalt sellest, kas keha liigub -telje suunas või sellele vastassuunas. Niisamuti võib pöördenurk olla kas positiivne või negatiivne, vastavalt järgmisele reeglile:
Pöördenurk on positiivne juhul, kui keha pöördub kellaosuti liikumisele vastupidi (vastupäeva), ning negatiivne siis, kui keha pöördub kellaosuti liikumise suunas (päripäeva).
„Päripäeva” tuleneb päikese päevasest liikumisest maapinna suhtes (piki silmapiiri). Tuleb kohe öelda, et selline määratlus kehtib vaid põhjapoolkeral, kus Päike liigub lõunakaares. Märksa universaalsem väljend päripäeva pöörlemise jaoks on „kellaosuti liikumise suunas” (ingl k. clockwise), mis vaikimisi fikseerib ka pöörlemistelje suuna: kujutleme kella olevat pöörleva keha all, numbrilaud näoga ülespoole ja risti pöörlemisteljega, ning vaatame, kuidas osutid liiguvad.
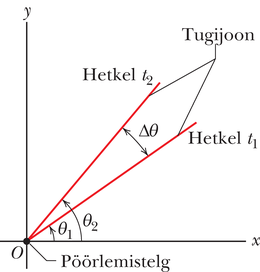
Oletame, et hetkel on keha asendis θ1 ja hetkel asendis θ2, nagu on kujutatud joonisel 10-4. Defineerime keha keskmise nurkkiiruse ajavahemikus hetkest kuni hetkeni valemiga
kus on keha pöördenurk ajavahemiku vältel ( on kreeka tähestiku väike oomega).
Keha (hetkeline) nurkkiirus , nagu me seda tavaliselt kasutame, on valemis 10-5 toodud suhte piirväärtus lähenemisel nullile. Niisiis
Kui me teame funktsiooni θ(t), võime nurkkiiruse leida kui selle funktsiooni tuletise aja järgi.
Valemid 10-5 ja 10-6 ei käi mitte ainult jäiga keha kui terviku, vaid ka selle keha suvalise osa (punkti) kohta, kuna need kõik on omavahel jäigalt seotud. Nurkkiiruse ühikuks on radiaan sekundi kohta (rad/s) või pööret sekundis (). Kasutatud on ka ühikut „pööret minutis”; näiteks eelmise sajandi vinüülplaadimängijate tavakiirused olid „ pööret minutis” või „ pööret minutis”.
Kui punktmass liigub piki -telge, võib tema kiirus olla nii positiivne kui negatiivne sõltuvalt sellest, kas ta liigub telje suunas või sellele vastassuunas. Niisamuti võib ka jäiga pöörleva keha nurkkiirus olla nii positiivne kui negatiivne sõltuvalt sellest, kas ta pöörleb vastupäeva (positiivne nurkkiirus) või päripäeva (negatiivne nurkkiirus). Räägitakse ka nurkkiiruse suurusest (mis ei sõltu pöörlemissuunast), mida samuti tähistatakse .
Kui keha nurkkiirus ei ole konstantne, siis peab kehal olema nurkkiirendus. Olgu keha nurkkiirused ajahetkedel ja vastavalt ja . Keha keskmine nurkkiirendus ajavahemikul kuni on defineeritud valemiga
kus on nurkkiiruse muutus, mis leiab aset ajavahemikul . Keha hetkeline nurkkiirendus , millest saab meie põhiline uurimisobjekt, defineeritakse kui keskmise nurkkiirenduse piirväärtus lähenemisel nullile:
Valemid 10-7 ja 10-8 kehtivad jällegi nii terve keha kui ka selle keha suvalise punkti kohta. Nurkkiirenduse ühikuks on enamasti radiaan sekundi ruudu kohta (rad/s2) või siis pööre sekundi ruudu kohta (p/s2).
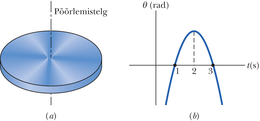
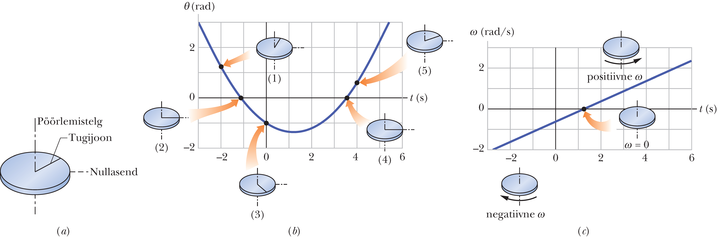
Ketas joonisel 10-5a pöörleb karussellina ümber tema keskpunkti läbiva telje. Kettaga seotud tugijoone asend θ(t) on antud valemiga
kus on sekundites, radiaanides ja tugijoone nullasend on märgitud joonisele.
(a)
Lahendus
JUHTMÕTE Ketta asendi määrab tugijoone pöördenurk nullasendi suhtes, θ(t), mille sõltuvuse ajast t annab valem 10-9. Valem võimaldab joonistada selle funktsiooni graafiku, mis ongi kujutatud joonisel 10-5b.
Arvutused: Et joonistada ketas koos tugijoonega etteantud ajahetkele vastavas asendis, peame leidma sellele ajahetkele vastava nurga θ. Selleks paneme etteantud aja valemisse 10-9. Ajamomendil t = 2,0 s saame
Seega hetkeks on tugijoon pöördunud vastupäeva algasendist võrra (vastupäeva selle pärast, et nurk oli positiivne). Ketta kujutis (1) joonisel 10-5b näitabki tugijoone sellist asendit.
Samal moel leiame hetke jaoks , mis tähendab, et tugijoon on pööratud päripäeva nullasendist võrra, nagu näitab asend . Kui , saame (asend ). Asendid, mil graafik ületab -telje, on lihtsasti kujutatavad, kuna sel momendil ja tugijoon ühtib hetkeliselt nullasendiga (asendid ja ).
(b)
Leidke aeg tmin, mil θ(t) jõuab joonisel 10-5b näidatud minimaalse väärtuseni. Kui suur on see minimaalne väärtus?
Lahendus
JUHTMÕTE Et leida funktsiooni ekstreemumit (käesoleval juhul miinimumi), tuleb võtta selle funktsiooni esimene tuletis võrdseks nulliga.
Arvutused: θ(t) esimene tuletis on
Võttes selle võrdseks nulliga ja lahendades saadud võrrandi aja suhtes, saame väärtuse, mille korral θ(t) väärtus on kõige väiksem:
Et leida minimaalset väärtust, paneme tmin valemisse 10-9 ja saame
Pöördenurga θ(t) minimaalne väärtus (joonisel 10-5b esitatud kõvera põhi) vastab ketta maksimaalsele päripäeva pöördele nullasendist loetuna ehk pisut rohkem kui kujutatud asendil .
(c)
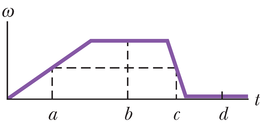
Visandage graafik, mis kujutab ketta nurkkiiruse sõltuvust ajast alates t=−3,0s kuni t=6,0s. Visandage ketas ja näidake selle pöörlemissuund ning märk ajahetkedel t=−2,0s, 4,0s ja tmin.
Lahendus
JUHTMÕTE Valemi 10-6 kohaselt on nurkkiirus võrdne tuletisega , mis on antud valemiga 10-10. Seega on meil
Funktsiooni graafik on esitatud joonisel 10-5c.
Arvutused: Et leida ketta pöörlemiskiirust hetkel , paneme selle väärtuse valemisse 10-11 ja saame
Miinusmärk ütleb, et hetkel pöörleb ketas päripäeva (alumine asend joonisel 10-5c).
Märk pluss tähendab siin, et hetkel pöörleb ketas vastupäeva (ülemine asend joonisel 10-5c).
Hetke jaoks me juba teame, et . Seega on ka . Niisiis peatub ketas hetkel, kus tugijoon jõuab joonisel 10-5b näidatud minimaalse väärtuseni, mida märgib ketta keskmine asend joonisel 10-5c.
(d)
Lahendus
Kirjeldus: Kui me alustame ketta vaatlemist hetkel t=−3,0s, on tema pöördenurk positiivne ja ta pöörleb aeglustuvalt päripäeva. Pöördenurga θ=−1,6rad juures ketas hetkeks peatub ning hakkab siis pöörlema vastupäeva, tema pöördenurk saab lõpuks jälle positiivseks.
Vurrkanni keerutatakse nurkkiirendusega
kus on sekundites ja radiaanides sekundi ruudu kohta. Hetkel on vurri nurkkiirus 5rad/s ja tugijoon asendis θ=2rad.
(a)
Lahendus
JUHTMÕTE Definitsiooni kohaselt on tuletis aja järgi. Seega tuleb leidmiseks integreerida aja järgi.
Arvutused: Valem 10-8 annab
niisiis
Siit leiame, et
Integreerimiskonstandi leidmiseks kasutame teadmist, et hetkel oli . Pannes need arvud meie võrrandisse, saame
Me kirjeldame punktmassi asukohta, kiirust ja kiirendust vektorite abil. Kui punktmass liigub sirgjooneliselt, pole vektoreid tegelikult vaja. Piki sirget saab punktmass liikuda ainult kahes suunas ja neid suundi võime eristada pluss- ja miinusmärgi abil.
Samal kombel saab kindla telje ümber pöörlev jäik keha pöörelda ainult kahes suunas – kellaosuti liikumise suunas (päripäeva) või sellele vastupidi (vastupäeva), kui vaadata piki telge, ning jällegi võime neid suundi eristada pluss- ja miinusmärgiga. Tekib küsimus: kas võib pöörleva keha pöördenurka, nurkkiirust ja nurkkiirendust käsitleda kui vektoreid? Vastus on jaatav, kuid hoiatame: pöördenurga korral pole see päris õige (lähemalt selgitame allpool).
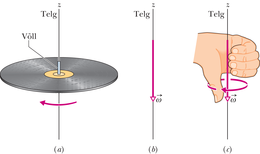
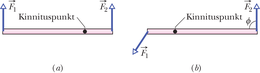
Vaatleme nurkkiirust. Joonis 10-6a kujutab pöörlevat grammofoniplaati. Plaat pöörleb päripäeva konstantse nurkkiirusega ( =3313 pööret minutis). Me võime seda nurkkiirust kujutada vektorina →ω, mis on suunatud piki pöörlemistelge, nagu näidatud joonisel 10-6b. Täpsemalt: valime vektori pikkuse vastavalt kokkulepitud mõõtkavale, näiteks nii, et vastab pöördele minutis. Seejärel määrame vektori →ω suuna, kasutades joonisel 10-6c näidatud parema käe reeglit: paneme kõverdatud sõrmede ja väljasirutatud pöidlaga parema käe plaadi kohale nii, et sõrmed on selle pöörlemise suunas. Väljasirutatud pöial ongi siis see, mis näitab nurkkiiruse vektori suunda. Kui plaat peaks pöörlema vastassuunas, oleks nurkkiiruse →ω parema käe reegli kohaselt leitud suund vastupidine.
Nurgamuutujate käsitlemine vektoritena ei ole just väga harjumuspärane. Meie alateadvus nõuab, et kui miski on vektor, siis peab midagi ka liikuma selle vektori poolt osutatud suunas. Siin pole see nii. Selle asemel miski (jäik keha) hoopis pöörleb selle vektori poolt määratud suuna ümber. Pöörlevate kehade maailmas ei määra vektorid mitte kehade liikumissuundi, vaid pöörlemistelgi. Siiski määratlevad ka need vektorid kehade liikumist. Samuti alluvad nad kõigile vektorarvu tuse reeglitele, mida käsitleti 3. peatükis. Ka nurkkiirendus →α on vektor ja ka tema allub nendele reeglitele.
Käesolevas peatükis vaatleme ainult pöörlemist ümber kindla telje. Sellisel juhul me ei vaja vektoreid – nii nurkkiiruse kui nurkkiirenduse määramiseks piisab nende väärtusest, kusjuures pöörlemissuuna saame paika panna, omistades vastupäeva pöörlemisele pluss- ja päripäeva pöörlemisele miinusmärgi.
Nüüd siis hoiatus: pöördenurka ei saa käsitleda vektorina (välja arvatud väga väikese pöörde korral). Aga miks? Tõepoolest, me võime anda talle nii suuruse kui suuna samal moel, nagu tegime nurkkiirusega joonisel 10-6. Kuid kui suurust esitab vektor, peab see suurus rahuldama ka vektorarvutuse reegleid, millest üks ütleb, et vektorite liitmisel summa ei sõltu liidetavate järjekorrast. Pöördenurga vektor seda nõuet ei rahulda.
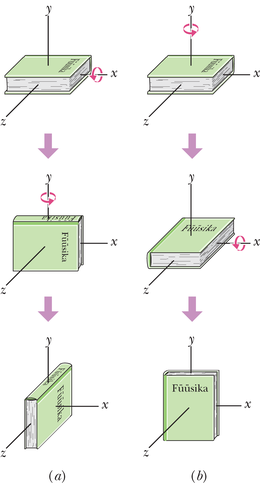
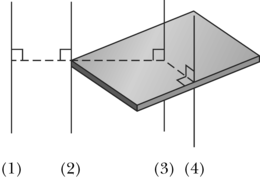
Sellekohast näidet näete joonisel 10-7. Raamatut, mille lähteasend on horisontaalne, pööratakse kaks korda võrra ümber teineteisega risti olevate telgede. Pöörded on identsed, aga nende sooritamise järjekord on erinev, protsess on näidatud joonistel 10-7a ja 10-7b. Nagu näeme, annavad erinevas järjekorras sooritatud ühesugused pöörded erineva lõppasendi. Teeme veel ühe näite. Hoidke parem käsi mööda külge all nii, et peopesa on vastu reit. Rannet paigal hoides (1) tõstke käsi ettepoole horisontaalasendisse, (2) viige käsi horisontaalselt kõrvale ja (3) laske käsi alla. Teie peopesa on nüüd suunatud ettepoole. Tehke nüüd samad liigutused, aga ümberpööratud järjekorras. Kuhu on nüüd pööratud peopesa? Mõlemast näitest järeldame, et pöördenurkade liitmisel sõltub summa nende liitmise järjekorrast, järelikult ei saa nad olla vektorid.
Kulgliikumise uurimisel käsitlesime tähtsat erijuhtu – konstantse kiirendusega sirgliikumist (näiteks kehade vaba langemine). Tabelis 2-1 tõime ära selle liikumise kohta käivad valemid.
Pöörlemise uurimisel on konstantse nurkkiirendusega pöörlemine samuti oluline ja ka selle kohta käivad valemid väärivad esile toomist. Me ei hakka neid siin tuletama, vaid kasutame kulgliikumise valemeid, asendades neis kulgliikumist kirjeldavad suurused pöörlemist kirjeldavate suurustega. Nii ongi tehtud tabelis 10‑1, kus on ära toodud mõlemad valemite komplektid (valemid 2-11 ja 2-15 kuni 2-18 ning 10-12 kuni 10-16).
Meenutame, et valemid 2-11 ja 2-15 on konstantse kiirendusega sirgliikumise põhivalemid – ülejäänuid on võimalik nendest tuletada. Samamoodi on ka pöördliikumisega: valemid 10-12 ja 10-13 on põhivalemid konstantse nurkkiirendusega pöörlemise korral, ülejäänuid saab nendest algebraliselt tuletada. Et lahendada lihtsamaid konstantse nurkkiirendusega pöörlemise kohta käivaid ülesandeid, võib kasutada tabelis toodud valemeid (kui see tabel on kättesaadav). Valige sealt valem, kus otsitav suurus on ainus tundmatu, ja avaldage see. Parem on siiski jätta meelde ainult valemid 10-12 ja 10-13 ning vajaduse korral tuletada neist see, mida vaja. Näitena pakume näidisülesannet 10-4.
KONTROLLKÜSIMUS 2
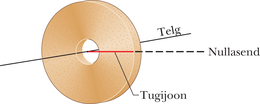
Käiakivi (joonis 10-8) pöörleb konstantse nurkkiirendusega α=0,35rad/s2. Hetkel on kivi nurkkiirus ω0=−4,6rad/s ning tugijoon on horisontaalasendis, millele vastab θ0=0.
(a)
Lahendus
JUHTMÕTE Et nurkkiirendus on konstantne, võime kasutada tabelis 10-1 toodud valemeid. Valime neist valemi 10-13
kuna ainsaks tundmatuks selles on otsitav aeg .
Arvutused: Pannes valemisse teadaolevad suurused ning asendades θ0=0 ja , saame
(Me teisendasime 5,0 pööret radiaaniks selleks, et viia see vastavusse teiste ühikutega.)
(b)
Lahendus
Kirjeldus: Alguses pöörleb kivi päripäeva (negatiivse nurkkiirusega) , aga tema nurkkiirendus on positiivne. See, et nurkkiirus ja nurkkiirendus on vastasmärgilised, tähendab, et negatiivse suunaga pöörlemine aeglustub, kuni kivi peatub ning hakkab seejärel pöörlema positiivses suunas (vastupäeva). Pärast seda, kui tugijoon on ületanud algasendi , teeb käi kuni ajahetkeni t=32s veel 5,0 täispööret.
(c)
Lahendus
Arvutused: Pöördume veel kord konstantse nurkkiirendusega pöörlemise võrrandite tabeli 10-1 poole ja jällegi vajame võrrandit, kus ainsaks tundmatuks on . Seekord peab aga võrrand sisaldama muutujat , mis tuleb enne otsitava leidmist võtta võrdseks nulliga. Valime valemi 10-12, mis annab
Kujutage ette, et juhtides näidisülesandes 6-8 kirjeldatud pöörlevat silindrit (Rootorit), näete te sõitjat paanikasse sattuvat ning vähendate täispöörde jooksul silindri nurkkiirust 3,40rad/s kuni 2,00rad/s. (Sõitja tunneb end pigem kulgeva kui pöörleva kehana.)
(a)
Lahendus
JUHTMÕTE Kuna silindri nurkkiirendus on konstantne, saab seda siduda nurkkiiruse ja pöördenurgaga valemite 10-12 ja 10-13 abil.
Arvutused: Nurkkiiruse algväärtus on , pöördenurk pööret ning nurkkiirus pärast selle nurga läbimist . Aga me ei tea põhivalemitesse kuuluvate nurkkiirenduse ja aja väärtusi.
Et saada lahti tundmatust muutujast , kirjutame valemi 10-12 ümber kujul
ja paneme selle valemisse 10-13, saades
Lahendades saadud võrrandi suhtes ja pannes sellesse teadaolevad andmed (kusjuures pööret on asendatud radiaaniga), leiame
Punktis 4-7 käsitlesime ühtlast ringliikumist, kus punktmass liikus kiirusega v piki ringjoont (edaspidi nimetame seda joonkiiruseks). Kui ümber telje pöörleb jäik keha, nt karussell, siis liiguvad piki ringjoont ümber pöörlemistelje kõik selle keha punktid. Kuna keha on jäik, teevad kõik punktid ühe täispöörde täpselt sama ajavahemiku jooksul, mis tähendab, et kõik nad liiguvad ühesuguse nurkkiirusega .
Mida kaugemal teljest punkt asub, seda pikem on tema teekonnale vastav ringjoon ja seda suurem peab olema tema joonkiirus. Te võite seda kontrollida karussellil. Ehkki teie nurkkiirus on ühesugune, ükskõik millises kohas te karussellil seisate, kasvab teie tegelik liikumiskiirus märgatavalt, kui lähenete karusselli servale.
Tihtipeale tekib meil vajadus omavahel siduda pöörleva keha mingi punkti kulgliikumist iseloomustavaid suurusi , ja ning pöörlemist iseloomustavaid suurusi , ja . Need kaks suuruste komplekti on omavahel seotud suuruse kaudu, milleks on vaadeldava punkti kaugus pöörlemisteljest piki viimasega risti olevat joont. Suurus on ühtlasi ka vaadeldava punkti liikumisteeks oleva ringjoone raadius.
Kui pöörleva jäiga keha tugijoon pöördub nurga võrra, siis iga tema pöörlemisteljest kaugusel asuva punkti poolt piki ringjoont läbitud tee pikkus s on võrdne ringjoone kaarega, mille pikkus on vastavalt valemile 10-1
See on meie esimene valem, mis seob kulgliikumist pöörlemisega. Hoiatus: Nurk peab olema radiaanides, kuna valem 10-17 on samaväärne radiaani kui nurga mõõtühiku definitsiooniga.
Võttes valemist 10-17 tuletise aja järgi – eeldusel, et ei muutu – saame
Kuid ds/dt on vaadeldava punkti joonkiirus (hetkkiiruse suurus) ja dθ/dt on pöörleva keha nurkkiirus . Niisiis
Hoiatus: Nurkkiiruses peab pöördenurk kindlasti olema antud radiaanides.
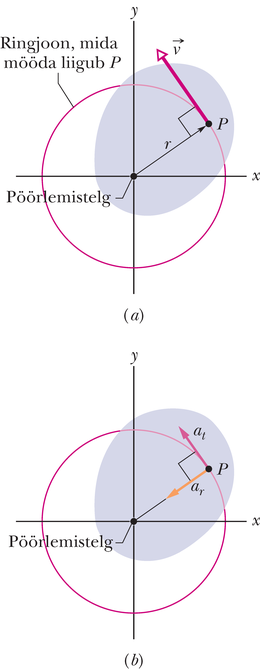
Valem 10-18 ütleb, et kuigi jäiga keha kõigi punktide nurkkiirus on ühesugune, liiguvad suurema joonkiirusega need punktid, mille kaugus pöörlemisteljest on suurem. Joonis 10-9a tuletab meile meelde, et punkti joonkiirus on alati vaadeldava punkti trajektooriks oleva ringjoone puutuja suunaline.
Kui pöörleva jäiga keha nurkkiirus on konstantne, siis ütleb valem 10-18, et iga sellesse kehasse kuuluva punkti joonkiirus on samuti konstantne. Niisiis on selle keha iga punkt ühtlases ringliikumises. Selle jäiga keha iga punkti pöörlemisperiood on määratud valemiga 4-35, mis kehtib ka kogu keha kohta:
See valem ütleb, et üheks pöördeks kuluv aeg on mingi punkti poolt selle pöörde käigus läbitud tee pikkus jagatud selle punkti joonkiirusega. Asendades valemist 10-18 ning taandades , saame, et
See eelmisega samaväärne valem ütleb, et ühele pöördele kuluv aeg võrdub sellele vastava pöördenurga ning pöördenurga muutumise kiirust väljendava nurkkiiruse suhtega.
Võttes valemist 10-18 tuletise aja järgi – eeldades jällegi, et on konstantne – saame:
Siin aga satume raskustesse. Valemis 10-21 olev liige dv/dt väljendab joonkiirenduse seda osa, mis on määratud punkti joonkiiruse suuruse muutumisega. Nagu kiirus , on ka kiirenduse kõnesolev osa suunatud piki trajektoori puutujat. Me nimetame teda vaadeldava punkti kiirenduse tangentsiaalkomponendiks at ning kirjutame
kus α=dω/dt. Hoiatus: Selles valemis peab nurkkiirenduses olema nurk mõõdetud radiaanides.
Lisaks sellele ütleb valem 4-34, et piki ringjoont liikuval punktmassil on ka kiirenduse radiaalkomponent ar=v2/r, mis on suunatud piki raadiust sissepoole ja mis toob kaasa joonkiiruse suuna muutumise. Kui asendada siia valemist 10‑18 , saame selle komponendi väärtuseks
Seega, nagu näidatud joonisel 10-9, on pöörleva jäiga keha iga punkti kiirendusel üldjuhul kaks komponenti. Piki raadiust sissepoole suunatud komponent ar (valem 10-23) on olemas alati, kui keha nurkkiirus ei ole null. Joonkiirenduse puutujasuunaline komponent (tangentsiaalkomponent) on aga olemas vaid juhul, kui nurkkiirendus ei ole null.
KONTROLLKÜSIMUS 3
Ameerika mäed on paljude lõbustusparkide oluliseks atraktsiooniks. Vaatamata raudtee kujundamisel rakendatavatele turvameetmetele on miljonite külastajate hulgas mõned õnnetud, kellele see lõbustus lõpeb haigusliku seisundiga, mida nimetatakse „Ameerika mägede peavaluks”. Haiguse sümptoomideks on peapööritus ja peavalu, mis võib kesta päevi ning nõuda meditsiinilist abi.
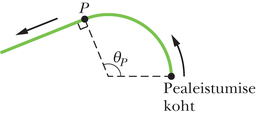
Uurime siin selle tõve põhjuseid, kujundades starditee (kus vankreid kiirendatakse magnetvälja abil piki horisontaalset pinda). Et juba alguses närvikõdi teha, püü takse tekitada stardirajal maksimaalselt suur kiirendus. Selleks kasutatakse ringjoone kaare kujulist rajalõiku, kus kiirendusele lisandub kesktõmbekiirendus (joonis 10-10). Kuna reisija liigub piki ringjoone kaart, kasvab tema kiirendus märgatavalt. Punktis , kus kogukiirendus saab võrdseks 4g-ga ning läbitud kaar vastab nurgale θP, hakkab reisija liikuma piki sirgjoont, mis ühtib kaare puutujaga.
(a)
Lahendus
JUHTMÕTTED (1) Mistahes ajahetkel on reisija kogukiirendus võrdne piki trajektoori puutujat suunatud tangentsiaalkiirenduse ning kaare kõverustsentrisse suunatud radiaalkiirenduse vektorsummaga. (2) Komponendi ar suurus on mistahes ajahetkel seotud nurkkiirusega vastavalt valemile 10-23 (
Arvutused: Kuna me soovime leida pöördenurga väärtust, valime konstantse nurkkiirendusega pöörlemise valemitest valemi 10-14:
Nurkkiirenduse asendame siia valemist 10-22:
Võttes ja θ0=0, leiame
Pannes siit leitud ω2 valemisse
saame seose radiaalkiirenduse, tangentsiaalkiirenduse ja pöördenurga vahel:
Kuna ja on teineteisega risti, on nende summavektori pikkus
Asendades siia ar valemist 10-28 ja leides saadud võrrandist , saame
Kui jõuab kavandatud väärtuseni 4g, peab nurk vastama otsitavale pöördenurgale θP. Pannes , ja valemisse 10-30, saame:
(b)
Lahendus
Mõttekäik: Punktis peab a omama kavandatud väärtust 4g. Niipea, kui reisija on punkti läbinud, hakkab ta liikuma piki sirgjoont ning kesktõmbekiirenduse mõju lakkab. Sellest hetkest liigub reisija piki sirget kiirendusega . Seega
„Ameerika mägede peavalu” tekib hetkel, kui reisija peale mõjuv kiirendus järsult muutub, sõltumata sellest, kas kiirendus on suurem enne või pärast muutust. Põhjuseks on asjaolu, et kiirendus paneb peaaju kolju suhtes liikuma, mistõttu aju koljuga siduvad veresooned võivad puruneda. Meie kavandatud kiirenduse suurendamine väärtuselt väärtuseni 4g piki punkti viivat teed võib samuti reisijat vigastada, kuid suurema tõenäosusega kutsub „Ameerika mägede peavalu” esile järsk kiirenduse muutus punktis .
Juhis 1: Nurgamuutujate ühikud
Valemiga 10-1 () alustame nurga mõõtühiku radiaani sisseviimist kõigisse võrranditesse, kus üheaegselt esinevad nii joon- kui nurgamõõdud. Nii peame pöördenurka mõõtma radiaanides, nurkkiirust rad/s ja rad/min, nurkkiirendust rad/s2 ja . Valemite 10-17, 10-18, 10-20, 10-22 ja 10-23 juures on selle rõhutamiseks lisatud eraldi märkus. Ainsaks erandiks sellest reeglist on valemid, mis sisaldavad ainult nurgamuutujaid, nagu näiteks tabelis 10-1 toodud. Neil juhtudel on teil vaba voli kasutada mistahes nurgaühikuid – võite kasutada radiaane, kraade või pöörete arvu –, aga vaid senikaua, kui teete seda järjekindlalt.
Valemites, kus kasutatakse radiaane, pole vaja seda erinevalt teistest ühikutest eraldi ära märkida, sest ta on puhtakujuline arv. Teil on vaba voli radiaaniühikut „rad” valemisse kirjutada või mitte kirjutada, sõltuvalt valemi kontekstist.
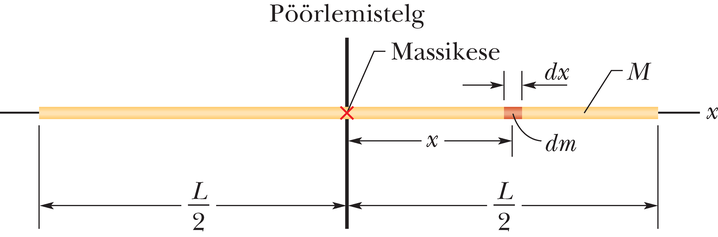
Kui kreissae ketas on pandud kiiresti pöörlema, siis on tal selle pöörlemise tõttu ka kineetiline energia. Kuidas seda energiat arvutada? Tavavalemit me sae kui terviku kohta kasutada ei saa, kuna see valem annaks meile üksnes saeketta massikeskme kineetilise energia, mis aga on null.
Selle asemel tuleb meil saeketast (ja ka iga teist pöörlevat jäika keha) vaadata kui erinevate kiirustega liikuvate punktmasside kogumit. Nende punktmasside kineetilisi energiaid kokku liites saamegi kogu keha kineetilise energia. See annab pöörleva keha kineetilise energia jaoks valemi:
kus mi on -nda punktmassi mass ja tema kiirus. Summeerida tuleb üle kõigi sellesse kehasse kuuluvate punktmasside.
Valemi 10-31 rakendamise teeb raskeks asjaolu, et pole kõigi punktide jaoks ühesugune. Sellest aitab üle saada joonkiiruse asendamine valemist 10-18 (v=ωr) ja nii saame:
kus on kõigi punktide jaoks sama.
Võrrandi 10-32 paremal pool sulgudes olev summa kirjeldab pöörleva keha massi jaotumist pöörlemistelje suhtes ja seda nimetatakse keha inertsimomendiks antud pöörlemistelje suhtes. (Pöörlemistelg tuleb alati eelnevalt fikseerida, kuna väärtus sõltub telje valikust.)
Nüüd võime kirjutada
Pannes selle valemisse 10-32, saame
mis ongi otsitav võrrand. Kuna kasutasime selle võrrandi tuletamisel valemit v=ωr, peab olema antud radiaanides. Inertsimomendi ühikuks SI süsteemis on kilogramm korda meeter ruudus ().
Valem 10-34, mis määrab jäiga keha pöörlemise kineetilise energia, on võrdväärne jäiga keha kulgliikumisel kasutatava valemiga . Mõlemas valemis on kordajaks . Massi asendab inertsimoment (mis sisaldab nii massi kui selle jaotumist). Ja lõpuks on mõlemas valemis kiiruse – ühel juhul joonkiiruse, teisel nurkkiiruse – ruut. Kulgliikumise ja pöördliikumise energiad ei ole erinevat tüüpi, nad mõlemad esindavad kineetilist energiat, kuid on sobitatud vastavalt liikumise tüübile.
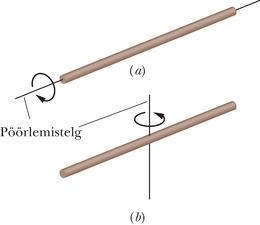
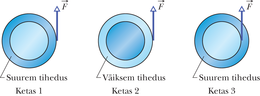
Oleme juba maininud, et pöörleva keha inertsimoment sisaldab mitte üksnes massi, vaid ka seda, kuidas mass on jaotunud pöörlemistelje suhtes. Seda saab väga lihtsalt järgi proovida. Keerutage pikka üsna rasket varrast (teivast, pikka latti või midagi sellesarnast) algul ümber pikitelje (joonis 10-11a) ning seejärel ümber varda keskpunkti läbiva ja vardaga risti oleva telje (joonis 10-11b). Mõlemal juhul on varda mass sama, aga esimesel juhul on teda palju kergem pöörlema panna. Põhjus on selles, et esimesel juhul on varda mass pöörlemisteljele hulga lähemal. Seetõttu on ka varda inertsimoment joonisel 10-11a palju väiksem kui joonisel 10-11b. Aga väiksem inertsimoment tähendab üldjuhul ka seda, et keha on kergem pöörata.
KONTROLLKÜSIMUS 4
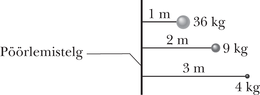
Kui jäik keha koosneb väikesest arvust punktmassidest, saame tema inertsimomendi arvutamiseks kasutada valemit 10-33 (): tuleb leida kõik korrutised ning need kokku liita. (Tuletame meelde, et kaugused mõõdetakse vastavast punktist kuni pöörlemisteljeni piki viimasega risti olevat sirget.)
Kui jäik keha koosneb väga suurest hulgast üksteisega külgnevatest tükikestest (st ta on pidev, nagu näiteks lendav taldrik), vajame valemi 10-33 järgi arvutamiseks juba arvutit. Sellisel juhul on mõtet asendada summa integraaliga ja defineerida keha inertsimoment kujul
Tabelis 10-2 on esitatud integreerimisel saadud tulemused üheksa sagedamini esineva keha jaoks joonisel oleva pöörlemistelje suhtes.
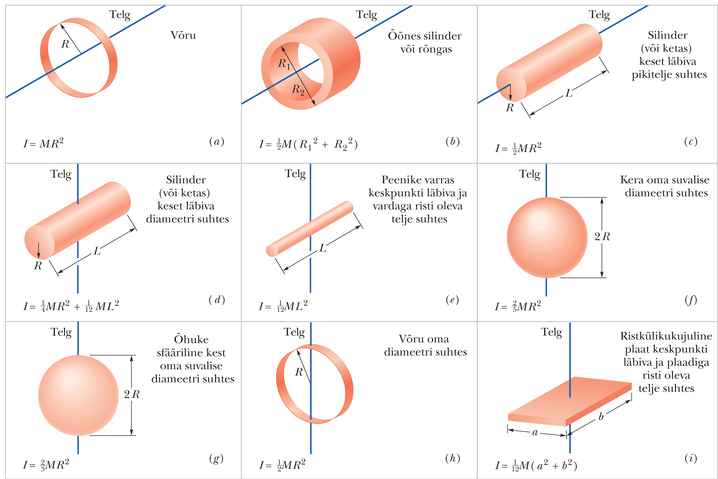
Oletame, et meil on vaja leida keha massiga jaoks tema inertsimoment etteantud telje suhtes. Põhimõtteliselt saame seda alati teha, kasutades integraali 10‑35, aga juhul, kui me juba teame selle keha inertsimomenti tema massikeset läbiva ning etteantud teljega paralleelse telje suhtes, on meil võimalik otsitav inertsimoment hõlpsamini leida. Olgu kaugus nende kahe telje vahel (mõõdetud piki mõlema omavahel paralleelse teljega risti olevat sirget). Sellisel juhul avaldub inertsimoment etteantud telje suhtes valemiga
Seda valemit tuntakse ka Steineri lause nime all. Tõestame selle teoreemi ning kasutame seda kontrollküsimuses 5 ja näidisülesandes 10-6.
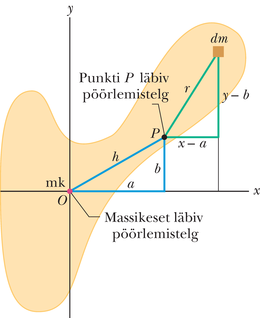
Olgu joonisel 10-12 kujutatud suvalise kujuga keha massikese. Võtame selle punkti koordinaatide alguspunktiks. Paneme pöörlemistelje läbi punkti nii, et see oleks joonise tasandiga risti, ja paneme teise, eelmisega paralleelse telje läbi punkti . Olgu selle punkti koordinaadid ja .
Võtame massielemendi , mille koordinaadid on ja . Keha inertsimoment punkti läbiva telje suhtes on lähtuvalt valemist 10-35
mida saab ümber kirjutada kujule
Massikeskme definitsiooni (valemi 9-9) kohaselt määravad valemi 10-37 kaks keskmist integraali massikeskme koordinaadid (kuni konstantse kordaja täpsuseni) ning peavad seetõttu olema nullid. Kuivõrd aga , kus on massielemendi kaugus punktist , siis on esimene integraal ehk keha inertsimoment tema massikeset läbiva telje suhtes. Valemist 10-12 näeme, et valemi 10-37 viimane liige on , kus on kogu keha mass. Seega taandub võrrand 10-37 võrrandiks 10-36, mida oligi tarvis tõestada.
KONTROLLKÜSIMUS 5
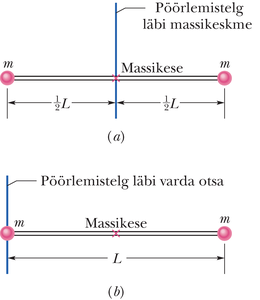
Joonisel 10-13a näete jäika keha, mis koosneb kahest punktmassist massiga , mida ühendab tühise massiga varras pikkusega .
(a)
Lahendus
JUHTMÕTE Kuna meil on ainult kaks punktmassi, siis on lihtsam leida inertsimoment valemist 10-33 kui integreerimise teel.
Arvutused: Kahe võrdse punktmassi korral, mis mõlemad asuvad pöörlemisteljest kaugusel , saame:
(b)
Lahendus
JUHTMÕTTED Kuna keha on suhteliselt on lihtne, saame inertsimomendi määramiseks kasutada kahte erinevat võtet. Esimene neist on sarnane punktis (a) toodule. Teine, palju efektiivsem võte on kasutada paralleelsete telgede teoreemi.
Esimene võte: Arvutame inertsimomendi sama valemiga nagu punktis (a), kuid selle erinevusega, et kaugus pöörlemisteljest on null vasakpoolse ning parempoolse punktmassi jaoks. Sel juhul annab valem 10-33:
Teine võte: Kuna me juba teame keha inertsimomenti massikeset läbiva telje suhtes ja kuna teine telg on paralleelne selle „massikeskme teljega”, siis rakendame paralleelsete telgede teoreemi (valemit 10-36). Saame
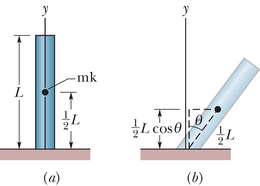
Joonisel 10-14 näeme ühtlast peenikest varrast, mille mass on ja pikkus , paigutatuna -teljele nii, et tema keskpunkt asub koordinaatide alguspunktis.
(a)
Kui suur on varda inertsimoment temaga risti oleva ja massikeset läbiva telje suhtes?
Lahendus
JUHTMÕTTED (1) Kuna varras on ühtlane, siis asub tema massikese varda keskpunktis. Järelikult me arvutame inertsimomenti . (b) Kuna varras on pidev, peame inertsimomendi leidmiseks kasutama valemis 10-35 olevat integraali,
Arvutused: Me tahame integreerida -koordinaadi järgi (mitte massi järgi, nagu on kirjas ülaltoodud valemis). Seega peame varda massielemendi avaldama joonelemendi kaudu. (Üks selline element ongi kujutatud joonisel 10-14.) Kuna varras on ühtlane, siis on massi ja pikkuse suhe ühesugune nii kõigi elementide kui ka kogu varda jaoks. Nii saame kirjutada:
ehk
Asendame saadud seose integraali 10-38 ja võtame võrdseks -ga. Seejärel arvutame integraali varda ühest otsast teiseni ( kuni ) võttes nii arvesse kõik elemendid. Saame
Tulemus on sama mis tabeli 10-2 lahtris e.
(b)
Lahendus
JUHTMÕTTED Võime arvutada , nihutades koordinaatide alguspunkti varda vasakusse otsa ja integreerides seejärel kuni x=L. Aga me võime ka kasutada lihtsamat ning universaalsemat võtet, rakendades paralleelsete telgede teoreemi (valem 10-36).
Arvutused: Kui paneme uue telje varda otspunkti nii, et ta oleks paralleelne massikeset läbiva teljega, siis tohime rakendada paralleelsete telgede teoreemi (valem 10-36). Eelmise osa (a) lahendist teame, et . Jooniselt 10-14 näeme, et uue ja vana, massikeset läbiva pöörlemistelje vaheline kaugus piki telgedega risti olevat sirget on . Valem 10-36 annab nüüd
Tegelikult kehtib see tulemus ükskõik millise ükskõik kumba vardaotsa läbiva ning vardaga risti oleva telje kohta sõltumata sellest, kas see on joonisel 10-14 kujutatud teljega paralleelne või mitte.
Näidisülesanne 10-8

Lahendus
JUHTMÕTE Vabanev energia on võrdne rootori pöörlemise kineetilise energiaga pöörlemiskiirusel 14000 pööret minutis.
Arvutused: Me saame leida valemist 10-34, aga enne seda tuleb meil arvutada rootori inertsimoment . Kuna rootoriks on karussellina pöörlev ketas, saab inertsimomendi leida tabelist 10-2c (). Seega
Rootori nurkkiirus on
Nüüd rakendame valemit 10-34, saades
Sellise plahvatuse lähedal olla on üsna ohtlik.
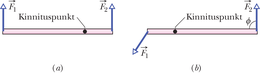
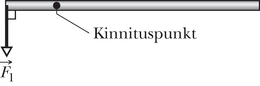
Ukselink pannakse alati uksehingedest nii kaugele kui võimalik üsna kindlal põhjusel. Kui soovite avada rasket ust, peate sellele rakendama jõudu, kuid sellest jääb väheks. Oluline on veel see, kuhu te jõu rakendate. Kui surute ust hingede lähedal või nurga all, mis erineb täisnurgast ukse pinna suhtes, tuleb teil rakendada suuremat jõudu kui siis, kui surute ust lingi lähedalt ja uksega -kraadise nurga all.
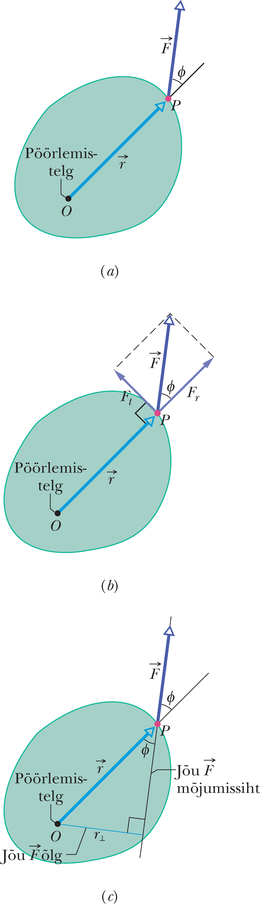
Joonisel 10-16a näete lõiget kehast, mis võib vabalt pöörelda ümber punkti läbiva ja selle lõikega risti oleva telje. Keha punktile , mille asukoht punkti suhtes on määratud vektoriga , mõjub jõud . Vektorid ja on teineteise suhtes nurga all. (Lihtsuse mõttes eeldame, et vektoritel ja ei ole pöörlemistelje sihilist komponenti, mis tähendab, et nad mõlemad on joonise tasandis.)
Et teha kindlaks vektori mõju keha pöörlemisele selle telje suhtes, jagame kaheks komponendiks (joonis 10-16b). Üks neist, radiaalkomponent , on suunatud piki vektorit . See komponent pöörlemist ei mõjuta, kuna tema pikendus läheb läbi punkti . (Kui lükkate ust ukseplaadiga paralleelselt, ei saa te ju ust pöörata.) Jõu teine komponent , mis on suunatud risti vektoriga ja mille suurus on , kannab nime tangentsiaalkomponent. Just see komponent on pöörlemise põhjuseks. (Te saate ust pöörata, kui surute teda ukseplaadiga risti olevas suunas.)
Jõu võime keha pöörata sõltub mitte üksnes tema tangentsiaalkomponendi suurusest, vaid ka sellest, kui kaugel punktist on jõu rakenduspunkt. Et neid mõlemaid arvestada, defineeritakse suurus , mida nimetatakse jõumomendiks ja mis on võrdne nende kahe mõjuteguri korrutisega:
Seega võime jõumomenti arvutada kahe valemiga,
ja
kus on kaugus pöörlemisteljest kuni jõuvektori pikenduseni, mõõdetuna piki viimasega risti olevat sirget (joonis 10-16c). Seda sirget nimetatakse jõu mõjumissihiks ning kaugust nimetatakse jõu õlaks. Joonis 10-16b aga näitab, et me võime käsitleda jõu õlana ka tema rakenduspunkti kaugust pöörlemisteljest, kui jõu asemel võtame tema õlaga risti oleva komponendi .
Jõumoment on jõu „võime” pöörata keha, millele ta on rakendatud. Kui te soovite mingit keha – näiteks kruvikeerajat või mutrivõtit – pöörata, peate rakendama jõumomenti. Jõumomendi ühikuks SI süsteemis on njuuton-meeter (). Hoiatus: Njuuton korda meeter on ka töö ühikuks. Et jõumoment ja töö on siiski väga erinevad suurused, ei tohi me neid segi ajada. Seepärast mõõdame tööd enamasti džaulides (), kuid ei kasuta kunagi džauli jõumomendi korral.
Järgmises punktis näitame, et üldjuhul on jõumoment vektor. Kuni me käsitleme üksnes pöörlemist ümber kindla telje, pole meil seda vaja. Oluline on aga määratleda jõumomendi märgi tähendus: see on positiivne juhul, kui rakendatav jõumoment paneb algselt paigaloleva keha pöörlema kellaosuti liikumisele vastupidi (vastupäeva), ja negatiivne juhul, kui keha pöörleb kellaosuti liikumise suunas (päripäeva). Samasuguse kokkuleppega määrasime pöördenurga märgi punktis 10-2.
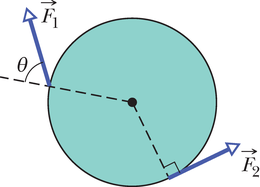
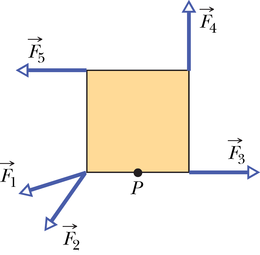
Ka jõumomentide kohta kehtib superpositsiooniprintsiip, sarnane viiendas peatükis kirjeldatud jõudude superpositsiooni printsiibiga. Kui kehale mõjub mitu jõumomenti, on temale mõjuv kogu-jõumoment (ehk jõumomentide resultant) võrdne üksikute jõumomentide summaga. Resultandi sümboliks on .
KONTROLLKÜSIMUS 6
Jõumoment on jäiga keha pöörlemise põhjuseks – me kasutame jõumomenti ukse avamisel. Järgnevas tuletame seose teljel pöörlevale kehale mõjuva jõumomendi ning selle poolt esile kutsutud nurkkiirenduse vahel. Me kasutame siin analoogiat Newtoni teise seadusega (), kus massiga keha kiirendus leitakse tema massi ja temale mõjuvate jõudude resultandi kaudu. Kui paneme asemele , asemele ning asemele radiaanmõõdus , saame
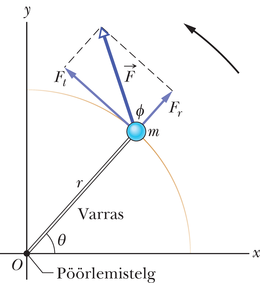
Selle valemi tõestamiseks kasutame kõigepealt joonisel 10-17 kujutatud lihtsat näidet. Võtame jäiga keha, mis koosneb punktmassist massiga ja massita vardast pikkusega . See keha saab pöörelda ainult ümber telje, mis läheb läbi varda teise otsa ning on joonise tasandiga risti. Nii võib punktmass liikuda ainult piki ringjoont, mille keskpunkt asub teljel.
Punktmassile mõjub jõud . Kuna aga punktmass saab liikuda vaid piki ringjoont, siis võib tema kiirust muuta ainult talle mõjuva jõu tangentsiaalkomponent (komponent, mis on punktmassi ringjoonelise trajektoori puutujaks, lad tangens – puutuja). Seostame selle komponendi punktmassi piki trajektoori suunatud tangentsialkiirendusega at, kasutades Newtoni teist seadust:
Punktmassile mõjuv jõumoment avaldub valemiga 10-40,
mille saame valemi 10-22 (at=αr) abil kirjutada kujul
Valemi paremal poolel sulgudes olev osa kujutab endast punktmassi inertsimomenti keha pöörlemistelje suhtes (vt valemit 10-33). Nüüd saab valem 10-43 kuju
Kui punktmassile mõjub rohkem kui üks jõud, võime valemit 10-44 üldistada, saades
mida me aga tahtsimegi tõestada. Võime laiendada saadud tulemust suvalisele ümber etteantud telje pöörlevale jäigale kehale, kuna sellist keha saab alati käsitleda kui punktmasside kogumit.
KONTROLLKÜSIMUS 7
Näidisülesanne 10-9 Arenda oma oskusi
Lahendus
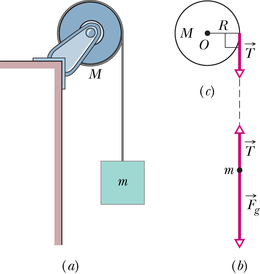
JUHTMÕTTED (1) Kui võtta vaatluse alla ainult klots, siis saame tema kiirenduse a leida temale mõjuvate jõudude järgi, kasutades Newtoni teist seadust (). (2) Kui võtta vaatluse alla ainult ketas, saame tema nurkkiirenduse arvutada temale mõjuva jõumomendi kaudu, rakendades Newtoni teist seadust pöörlemise kohta (). (3) Võttes vaatluse alla kettast ja klotsist koosneva süsteemi, saame kasutada fakti, et klotsi kiirendus on võrdne ketta serval oleva punkti joonkiirendusega.
Klotsile mõjuvad jõud: Kõik klotsile mõjuvad jõud on kujutatud vektordiagrammil joonisel 10-18b. Nööri poolt mõjuv jõud on ja gravitatsioonijõud suurusega on . Kirjutame Newtoni teise seaduse vertikaaltelje sihis mõjuvate jõukomponentide jaoks:
Ometi ei saa me siit leida otsitavat suurust , kuna valemis on tundmatu suurus .
Kettale mõjuv jõumoment: Kuna -telje valemid meile lahendust ei andnud, vaatame nüüd -telge. Seekord peame uurima ketta pöörlemist. Et arvutada jõumomenti ja inertsimomenti , võtame pöörlemistelje läbi ketta keskpunkti , risti joonise tasandiga (joonis 10-8c).
Jõumomendi saame arvutada valemist 10-40 (). Nii kettale mõjuv gravitatsioonijõud kui kettale telje poolt mõjuv jõud on rakendatud selle keskpunkti (kaugusel ), seega on null ka nende poolt tekitatav jõumoment. Nöör mõjutab ketast jõuga kaugusel ning on suunatud piki ketta välisserva puutujat. Seega on tema poolt tekitatav jõumoment ; miinusmärk tähendab, et ta pöörab ketast paigalseisu suhtes päripäeva. Tabelist 10-2c saame ketta inertsimomendiks . Seose saame nüüd kirjutada kujul
See valem näib veelgi kasutum, kuna siin on koguni kaks tundmatut, ja , ning kumbki neist pole otsitav . Kui aga kogu füüsika-alane julgus kokku võtta, võime valemi siiski kasulikuks muuta: kuna nöör kettal ei libise, on klotsi joonkiirendus ning ketta serva tangentsiaalkiirendus omavahel võrdsed. Seega on valemi 10-22 (at=αr) kohaselt siin . Kui panna see valemisse 10‑47, saame
Ühendame tulemused: Kui valemid 10-46 ja 10-48 kokku võtta, saame
Et leida , kasutame valemit 10-48:
Nagu oligi arvata, on langeva klotsi kiirendus väiksem kui ning nööri pinge () väiksem kui rippuvale klotsile mõjuv gravitatsioonijõud (). Veel märkame, et nii kui sõltuvad ketta massist, mitte aga selle raadiusest. Kontrollime tulemust: kui kettal mass puudub (), siis on ja , mida oligi arvata, kuna siis kukub klots nagu vaba keha. Valemist 10‑22 saame leida ka ketta nurkkiirenduse
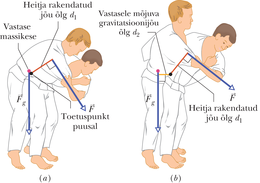
Et sooritada puusaheidet, peab džuudomaadleja sikutama vastast riietest jõuga , mille õlg on arvestades toetuspunktist (mida läbib pöörlemistelg) maadleja parema puusa kohal (joonis 10-19). Heitmisel tuleb vastast pöörata ümber selle toetuspunkti nurkkiirendusega ; miinus tähendab, et joonisel peab nurkkiirendus toimima päripäeva. Eeldame, et vastase inertsimoment toetuspunkti läbiva telje suhtes on .
(a)
Lahendus
JUHTMÕTE Kui nurkkiirendus on teada, saab tõmbe tugevuse leidmiseks kasutada Newtoni teist seadust pöördliikumise kohta ().
Arvutused: Kui vastase jalad on maast lahti, võime eeldada, et talle mõjub ainult kolm jõudu: tõmme , heitja puusa normaaljõud (see jõud pole joonisele 10-19 märgitud) ja gravitatsioonijõud . Et kasutada valemit , tuleb leida neile jõududele vastavad kolm jõumomenti toetuspunkti suhtes.
Valemi 10-41 () kohaselt on tõmbe moment , kus on selle jõu õlg ja märk miinus näitab, et vastav jõumoment pöörab keha päripäeva. Jõu moment on null, kuna see mõjub toetuspunktis ja tema õlg on seega .
Et leida gravitatsioonijõu momenti, võime lugeda, et rakendub vastase massikeskmesse. Kuna massikese on tõmmatud puusal asuvasse toetuspunkti, on ka jõu õlg ja nii on temagi moment null. Järelikult on ainus nullist erinev jõumoment tingitud heitja tõmbest ja nii võime kirjutada asemel
(b)
Lahendus
JUHTMÕTE Kuna jõu õlg ei ole enam null, on tema moment nüüd , mis on positiivne, kuna püüab pöörata vastase keha vastupäeva.
Arvutused: Valemist saame nüüd
mis annab
Esimesest ülesande poolest teame, et võrduse parema poole esimese liikme väärtus on . Pannes selle ja kõik ülejäänud andmed valemisse, leiame
Tulemusest järeldub, et kui vastase massikese pole eelnevalt puusale tõmmatud, läheb heiteks vaja märksa suuremat jõudu. Heale judokale on see füüsika tuttav.
Nagu nägime 7. peatükis, sunnib jõud , mõjudes jäigale kehale massiga , keha liikuma kiirenevalt piki sirgjoont, tehes seejuures töö . Seetõttu muutub keha kineetiline energia (). Oletame, et see on ainus energia, mis muutub. Sellisel juhul võime siduda keha kineetilise energia muutuse talle mõjuva jõu poolt tehtava tööga , kasutades teoreemi tööst ja kineetilisest energiast (valem 7-10):
Kui liikumine saab toimuda üksnes piki -telge, saame töö leida valemist 7-32,
Kui on konstantne, taandub see valem kujule , kus on keha nihe. Töö tegemise kiirust nimetatakse võimsuseks; viimase saame leida valemitest 7-43 ja 7-48:
Vaatleme nüüd pöörlemist ümber kindla telje, kasutades sama lähenemisviisi. Kui jõumoment paneb jäiga keha kiirendusega pöörlema, teeb see jõumoment töö . Selle käigus muutub keha pöörlemise kineetiline energia (). Ka siin võime tehtud töö siduda kineetilise energia muutusega , kasutades jällegi teoreemi tööst ja kineetilisest energiast, kuid nüüd on tegu pöörlemise kineetilise energiaga:
Selles valemis tähistab keha inertsimomenti antud telje suhtes ning ja on keha nurkkiirused vastavalt enne ja pärast töö tegemist.
Me võime töö arvutada ka valemi 10-50 pöördliikumise analoogiga
kus on töö teinud jõumoment ning ja keha pöördenurgad enne ja pärast töö tegemist. Kui jõumoment on konstantne, taandub valem 10-53 kujule
Kiirus, millega tööd tehakse, on võimsus, selle arvutamiseks kasutame valemi 10‑51 analoogi pöördliikumise jaoks:
Tabelis 10-3 on kokku võetud valemid, mida võib kasutada ümber kindla telje pöörleva jäiga keha jaoks, ning nendele vastavad sirgliikumise valemid.
| Puhas sirgjooneline liikumine (kindel suund) | Puhas pöörlemine (kindel telg) | ||
Asukoht | Asend (pöördenurk) | ||
| Kiirus | Nurkkiirus | ||
| Kiirendus | Nurkkiirendus | α=dω/dt | |
| Mass | Inertsimoment | ||
| Newtoni teine seadus | Newtoni teine seadus | ||
| Töö | Töö | ||
| Kineetiline energia | Kineetiline energia | ||
| Võimsus (konstantne jõud) | Võimsus (konstantne jõumoment) | ||
| Teoreem tööst ja kineetilisest energiast | Teoreem tööst ja kineetilisest energiast | ||
Vaatleme jällegi joonisel 10-17 kujutatud olukorda, kus jõud pöörab jäika keha, mis koosneb massita varda otsa kinnitatud punktmassist massiga . Pöörates keha, teeb jõud tööd. Oletame, et ainus energialiik, mida jõud muudab, on kineetiline energia. Sel juhul võime rakendada teoreemi tööst ja kineetilisest energiast, mis on antud valemiga 10-49:
Võttes ja kasutades valemit 10-18 (v=ωr), saame selle kirjutada kujul
Valemi 10-33 kohaselt on selle ühe-punktmassi-süsteemi inertsimoment . Kui panna see valemisse 10-57, saame:
mis ühtib valemiga 10-52. Me tuletasime selle ühest punktmassist koosneva jäiga keha kohta, aga see kehtib suvalise ümber kindla telje pöörleva jäiga keha korral.
Järgmisena leiame joonisel 10-17 kujutatud kehale mõjuva jõu poolt tehtava töö selle jõu momendi kaudu. Kui punktmass liigub piki oma ringjoonelist trajektoori teepikkuse ds võrra, muudab tema kiirust üksnes talle mõjuva jõu tangentsiaalkomponent . Järelikult teeb tööd üksnes . Selle töö suuruseks saame . Aga me võime panna ds asemele , kus on punktmassi nihkele vastav pöördenurk. Sel juhul saame:
Valemi 10-40 kohaselt on korrutis võrdne jõumomendiga , nii saame valemi 10-58 uue kuju
Lõpliku suurusega pöördenurga korral tuleb töö leidmiseks võtta integraal -st kuni -ni, niisiis:
ja see ongi valem 10-53. See kehtib mistahes kindlal teljel pöörleva jäiga keha jaoks. Valem 10-54 järeldub otseselt valemist 10-53.
Pöördliikumise võimsuse leiame valemist 10-59:
mis ongi tõestamisele kuuluv valem 10-55.
Näidisülesanne 10-11
Lahendus
JUHTMÕTE Kineetilise energia saame leida valemist 10-34 (). Me juba teame, et aga me ei tea veel väärtust hetkel . Kuna me aga teame, et ketta nurkkiirendus on konstantne väärtusega saame siin kasutada konstantse kiirendusega pöörlemise valemeid tabelist 10-1.
Arvutused: Kuna me otsime nurkkiirust ja teame nurkkiirendust ning nurkkiiruse algväärtust () kasutame valemit 10-12:
Pannes ja valemisse 10-34, saame
JUHTMÕTE Sama vastuse saame ka siis, kui leiame ketta kineetilise energia temaga tehtud töö järgi.
Arvutused: Kõigepealt seome ketta kineetilise energia muudu temaga tehtud kogutööga , kasutades teoreemi tööst ja kineetilisest energiast, mis on antud valemiga 10-51 (). Pannes asemele ja asemele , saame
Järgmisena leiame töö . Tehtud töö sõltuvus kettale mõjuvast jõumomendist on antud valemiga 10‑53 või 10‑54. Ainus kiirendust tekitav jõumoment on kettale mõjuv nööri pinge näidisülesandes 10-9 leidsime, et selle jõumoment on . Kuna on konstantne, peab konstantne olema ka jõumoment. Seega võime kasutada valemit 10-54, saades
Kuna on konstantne, saame leida valemist 10-13. Et , saame
Nüüd paneme selle valemisse 10-61 ja saadud tulemuse valemisse 10-60. Kuna ja (need on leitud näidisülesandes 10-9), saame
Näidisülesanne 10-12
Lahendus
JUHTMÕTTED (1) Pöörlemise ajal ei saa mehaaniline energia (pöörlemise kineetilise energia ja gravitatsiooni potentsiaalse energia summa) muutuda. (2) Pöörlemise kineetilist energiat saab arvutada valemiga 10-34 ().
Mehaanilise energia jäävuse seadus: Kui korstna massikese allapoole langeb, muutub gravitatsiooni potentsiaalne energia pöörlemise kineetiliseks energiaks , kuid energia koguhulk jääb muutumatuks. Seda saab kirja panna valemiga
Pöörlemise kineetiline energia: Kineetilise energia algväärtus on null, tema väärtus kukkumise ajal () aga sõltub inertsimomendist . Kui tegu on peenikese vardaga, mis pöörleb oma massikeskme ümber (mis asub varda keskel), saame tabelist 10-2 , kus on varda mass ja tema pikkus. Kuna meie vardakujuline korsten pöörleb ümber ühe otsa, mille kaugus keskpunktist on , tuleb meil inertsimomendi leidmiseks kasutada paralleelsete telgede teoreemi (Steineri lauset). Nii saame, et
Pannes selle valemisse , saame
Potentsiaalne energia: Potentsiaalne energia () sõltub korstna kõikide jupikeste kõrgusest. Aga me võime arvutada eeldades, et kogu korstna mass on koondunud tema massikeskmesse, mille algkõrgus on . Sedasi saame potentsiaalseks energiaks
Jooniselt 10-20b näeme, et kui korsten on pöördunud nurga võrra, on tema massikese kõrgusel . Nüüd on tema potentsiaalne energia
Nurkkiirus: Pannes valemid 10-66, 10-65 ja 10-64 valemisse 10-62 ning võttes , võime avaldada ja leida selle väärtuse
Kommentaar: Kukkuva korstna alumine osa püüab pöörelda ümber vundamendi kiiremini kui ülemine osa ja tõenäoliselt murdub korsten kukkudes pooleks nii, et ülemine ots jääb kukkumisel alumisest otsast maha.
Näidisülesanne 10-13
Lahendus
JUHTMÕTE (1) Pöörlemise kineetiline energia on antud valemiga 10-34 (). (2) Keskmise võimsuse leiame valemist 8-40 ().
Arvutused: Kui nurkkiirus saavutab maksimaalse väärtuse, on pöörlemise kineetiline energia
Keskmine võimsus on
See võimsus on palju suurem, kui ükski kreveti kiirelt toimiv lihas oleks suuteline tootma. Tegelikult tõmbab krevett dactylus’t avades lihase vedruna pingesse ning salvestab sel moel energiat (kuna sõra avamine on aeglasem, on vastavalt väiksem ka selleks vaja minev võimsus). Kui salvestatud energiahulk on piisav, dactylus vabaneb ning pingesse tõmmatud lihas sunnib sõra silmapilkselt sulguma (kusjuures võimsus on väga suur). Samasugust väikese võimsusega energia salvestamist, millele järgneb energia järsk vabanemine, kasutavad paljud teisedki loomad – et oma söögikord kätte saada või siis selleks, et ise teiste söögiks sattumisest pääseda.